


Michael Walsh
MrPLC Admin-
Content count
1801 -
Joined
-
Last visited




About Michael Walsh

-
Rank
Omron Expert
- Birthday 07/22/73
Recent Profile Visitors
-
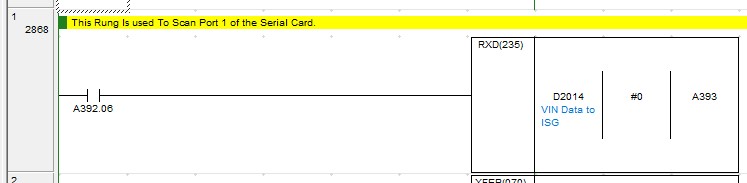
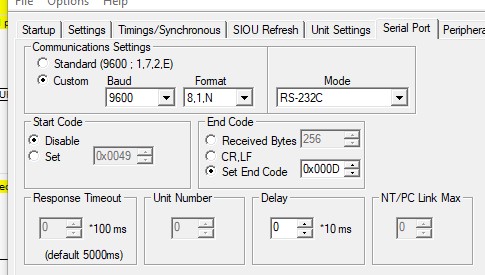
Hello Michael, Omron CJ2H on board RS232C port set per attachment using a barcode scanner we use multiple other instances. The reception flag is not turning on. The data buffer A393 continues to store data but the RXD does not execute due to the flag A392.06 not going high.
-
I am glad to help people. I will not just do it for them, particularly if they get an attitude.
-
You could also use @D. It is simpler. First scan, MOV &1 D0 - initialize pointer to point at D1 When you want to store a temperature: MOV Temperature @D0 - Move the temperature to the address that D0 is pointing to INC D0 - increment D0 by 1.
-

Looking for NJ/NX Communication DLLs for Visual Studio
Michael Walsh replied to FLAutomation's topic in NJ Series / Sysmac Studio
I was looking at FINS with an NX701 controller today and happened across this thread. One additional thing to point out is that ONLY the database versions of the NX701 (NX701-1*20 processors) after version 1.16 support FINS. -
Little Confused with the ANALOG Output Description
Michael Walsh replied to skyfox's topic in NJ Series / Sysmac Studio
I agree with this. If you put -15000 in the output variable you should expect to see -10V out. If you put 15000 in the output variable, you should expect to see 10V output. -
Communication problem between Omron a other devices
Michael Walsh replied to plc_begginer's topic in NJ Series / Sysmac Studio
This is a true statement, but this also might point to his problem. He is using TCP Socket instructions in his code. These questions need to be answered: Are you intending to use EtherNet/IP Comms? If so, are you trying to use implicit or explicit communications? Or are you intending to use raw TCP/IP Commands? It looks like your code is using TCP/IP Commands, but your other comments imply that you are trying to use EtherNet/IP Communications. These are two different things. -
@willer I fixed the link above and you can get his program now.
-
Looking for NJ/NX Communication DLLs for Visual Studio
Michael Walsh replied to FLAutomation's topic in NJ Series / Sysmac Studio
One confirmation and one additional note with regards to FINS comms on NX controllers. The NX7 could support FINS as of v1.16 as stated by @photovoltaic and ONLY port 2 supports FINS commands on the NX102. I posted to make the point about port 2, but since the 1.16 point was here in this graphic as well, I thought that I would confirm. Never doubted you @photovoltaic! -
TLS session establishment fail
Michael Walsh replied to ZeroHeroDXD's topic in NJ Series / Sysmac Studio
Omron has an MQTT library of Function blocks. I would recommend that you use them. You can download the library here: https://www.ia.omron.com/product/tool/sysmac-library/index.html Your software does need to be registered to login. I have also attached a document describing the process and some sample code. It shows how to do it using Mosquitto, but you should be able to go from there. MQTT Sysmac Controllers and Mosquitto POC.pdf MQTT NX102 and NJ301.smc2 -
If you want to move the axis continuously at a specific speed, you need to use MC_MoveVelocity. To stop it from moving use MC_Stop.
-
Ethernet Communication Between CS1G and RedLion Graphite HMI
Michael Walsh replied to Reilly's topic in Omron
I agree with @lostcontrol. You always want the source and destination unit numbers to be set to 0 for this type of communication. The unit number would only be used if you were trying to communicate directly to a network card or other unit. Unit # set to 0 is referring to communicating to the CPU, which is the desired result. One other note with regards to the routing table: If there is another network card in the PLC, it will have to have a routing table. A routing table just assigns network numbers to each network. So, Ethernet could be net 1 and some other card could be net 2. -
Use the reception counter Auxiliary Address to do your receive. When the the reception completed flag turns on, use the Reception Counter word to determine how many bytes to receive. So, using port 1, it would look like this: I arbitrarily chose D200 for the reception area.
-
Wieland SP-COP1-ENI Ethernet/IP with NX102
Michael Walsh replied to Spring's topic in NJ Series / Sysmac Studio
I was trying to show you how I would set this up at least and I cannot find the EDS file. Can you attach it and I will share how I would do it? Of course that doesn't mean that it would work, if something is wrong with their EDS file, but I could show you how the setup should look at least. -
Sergei makes a good suggestion. I might also set CR+LF as the end code and receive each part of the message separately (5 total messages, if I understand correctly).
-
NX102-1220 Ethercat SEW MDX61B
Michael Walsh replied to NootNoot's topic in NJ Series / Sysmac Studio
I modified the PDO map for the drive to look like this for the input side: I am unsure about the ActPos_Abs being the correct selection as there are multiple options for actual position. You may need to ask SEW. And this for the output: I also enabled the distributed clock (right below the PDO Map Settings button). And then I mapped them like this for the axis: When I do this, I still get the same error that you were getting. So I kept digging. I noticed that SEW's Control Word and Status Word were DINTs (32 bits), so instead I mapped PI0001 and PO001 to those and removed the control word and status word from the PDO map. Then I attached those to the Axis settings like this: When I download that, the error goes away. Of course it will likely not work at this point, but it does show that the issue is that SEW's control Word and Status Word (both should be 16 bits as that is what WORD implies) are actually 32 bits. So (SEW, ha!), I would ask SEW what the deal is with 32 bit Status and Control WORDs. They may be able to somehow map one half of those 32 bits to both the PO001 and PI001 WORDs.