
Search the Community
Showing results for tags 'nx1p2'.
Found 47 results
-
I made an Ethernet connection between an NX1P2 and a CJ2M using network configurator and I already have a real-time data input and output connection in the memory of both plcs. I need to send a 20-byte word and when the NX1P2 is modified in the CJ2M using Sysmac Studio, it receives that string of bits, decompresses each bit to be able to activate the NX1P2 outputs.
-
Can someone please help me figure out how to create a 12 hour long timer function in Sysmac? Or at least help me determine which timer function (in any) is best suited to create this long of a timer? Or will this require a counter instead? If so, does anyone have an examples on how to go about this? I'd like this timer to start it's function when powered up, and after the 12 hour timer is finished I will have it open a certain page on my HMI. Thanks!
-
Hello, Is there any easy way to make "HMI like webserver" for omron? I did not even found any examples how to make one. wago have very easy way to make webserver for your project. ( https://www.youtube.com/watch?v=xjK9UNWqeEA ) Engineers need to use Hmi rarely, so webserver would save money. Every service engineer have laptops, but are not familar with plc, so we can't give them sysmac studio. Feels stupid to change brand because we have allready used NX1p2 in many other applications. Is there any 3rd party options for webservers? Thanks for answers!
-

Two Keyence Ethercat devices not working at same time
taxidelt posted a topic in NJ Series / Sysmac Studio
I am trying to use two different Keyence measurement devices but it won't let me use both of the ESI files (that are different files). Which every I import first either the TM-X5000 or the LJ-X8002 it will work but when I attempt to bring in the second device I get an error saying "that ESI file already exists" and won't allow it to be used. I've attached the two ESI files I am attempting to use that were downloaded from the Keyence website. I am using an NX1P2-9024DT1 controller and running Sysmac Studio ver 1.52 ( I know this is out of date but I cannot connect to the update server due to my works network security). Downloads_20240129_232701.zip *edited to add actual error message code* "- The same slave exists in the installed ESI file. Please uninstall it and try again. Keyence TM-X5k_CB-NEC20E.xml(Installed : Keyence LJ-X8k_CB-NEC20E.xml - Parameter 128Byte) Keyence TM-X5k_CB-NEC20E.xml(Installed : Keyence LJ-X8k_CB-NEC20E.xml - Parameter 256Byte) Keyence TM-X5k_CB-NEC20E.xml(Installed : Keyence LJ-X8k_CB-NEC20E.xml - Parameter 32Byte) Keyence TM-X5k_CB-NEC20E.xml(Installed : Keyence LJ-X8k_CB-NEC20E.xml - Parameter 512Byte) Keyence TM-X5k_CB-NEC20E.xml(Installed : Keyence LJ-X8k_CB-NEC20E.xml - Parameter 64Byte) Keyence TM-X5k_CB-NEC20E.xml(Installed : Keyence LJ-X8k_CB-NEC20E.xml - Result Data 128Byte) Keyence TM-X5k_CB-NEC20E.xml(Installed : Keyence LJ-X8k_CB-NEC20E.xml - Result Data 256Byte) Keyence TM-X5k_CB-NEC20E.xml(Installed : Keyence LJ-X8k_CB-NEC20E.xml - Result Data 32Byte) Keyence TM-X5k_CB-NEC20E.xml(Installed : Keyence LJ-X8k_CB-NEC20E.xml - Result Data 512Byte) Keyence TM-X5k_CB-NEC20E.xml(Installed : Keyence LJ-X8k_CB-NEC20E.xml - Result Data 64Byte)" -
Performing Linear Interpolation between a Rotary and a Linear Servo
GM189 posted a topic in NJ Series / Sysmac Studio
Hello everyone, new to this forum! I'm asking for advice on the synchronization between a rotary and a linear servo. Let's say, if the linear motor moves 20 mm the rotary one should turn 10 times (3600 degrees). It's a very similar situation to this thread. So there's 2 points to consider: 1. Can I perform linear interpolation if the rotary motor is working with modulo (from 0° to 360°)? How should I write the MC_MoveLinear parameters in order to achieve that with more than one turn, that is, target position beyond the modulo range? 2. I've also considered using electronic gearing, which would make my life easier with calculations, but if there's any type of delay between the servos (aka catching phase of the MC_GearIn) it could result in tool breakage. Is there a way to use electronic gearing while guaranteeing both acceleration and deceleration stay in sync? The CPU I'm working with is the NX1P2-1040. Any advice is appreciated, thanks in advance! -
¿Alguien sabe cómo crear un puente entre un plc nx1p2 y el escritorio de una PC para crear, abrir, cerrar o eliminar archivos txt o cualquier otro?
-
Hello, Seeking for assistance on how to program the below conditions, If I wanted to see the history of the total numbers per hour, like it will be displayed in my HMI Events Screen. How will I do it? Attached image is the one I am trying to work on, but still not working. Do you have any other suggestions what to use in the program for me to be able to display the logs per hour? Thank you for any help you may give.
-

NX-RS1201 One Touch Tare Subtraction Execution
razelmania posted a topic in NJ Series / Sysmac Studio
Hello, Seeking for your help on my load cell module RS1201, I am having trouble on how to activate the Ch1_One_touch_Tare_Subtraction_Execution. I have used it on my HMI using that address for tare, upon pressing the momentary button the value would change to zero. But if I release the button, the value would turn back to it's initial value before pressing the Tare Button. How will I be able to zero it? Thank you for any suggestion you may give. -
Hi, we have one PLC that throws many errors on task period exceeded. checking the status, this warning have come over 15000 times since when ever it started couting it. Max cycle time is 2.83ms while max allowed task is the default(?) 2ms. We think it has something to do with the block for the barcode scanning. this blockas around 134ns cycle time when it seems normal, all other blocks is around 4-8 ns. How can we make sure what part that sometimes exceeds the 2 ms execution time?
-
How to create a weight totalizer program in sysmac studio
razelmania posted a topic in NJ Series / Sysmac Studio
Hello, Seeking for your assistance on how to create a weight totalizing program using my NX1P2-1040DT1. I am having trouble creating one, since I am just learning this for the first time. Does it have special instruction or function block to directly totalize the numbers or should I use increment/add instruction? and Where should I move the data to store it as one? Thank you for any suggestions you may give. -
Illegal User Program/Controller Configuration and Setup
SKA AB posted a topic in NJ Series / Sysmac Studio
Hi. I have this project to rewrite the code for a station of several machines. Currently i tried to run the simulation with the CPU NX1P2-9024DT1, Unit version 1.8. Why does this error arrive? I Run Sucky win11, Sysmac v1.52 -
I am currently trying to connect my OMRON NX1P2 1040DT1 (Using CIF-105) to my Unitronics V570 PLC, With my OMRON PLC as Master. It seems as if Unitonics Rs485 only wants a six-wire connection type but my OMRON PLC wants a 2-wire or 4-wire connection, Wondering if anyone has a solution to my problem and can assist me.
-
Just added a Keyence IV3 vision sensor to my NX1P2 system and have a little issue with the Tag Set / data structure. The Input and Output assemblies imported with the .eds file are an Input assembly of 101 with 394 byte size and an Output assembly of 242 with a 12 byte size. The problem I have is that the 101 Input assy size of 394 bytes does not allow me the OK/NG status of the vision tools from 17 to 64. I need an additional 6 bytes to access these bits in my data allocation table. My question is, Is it possible to modify this Input assy to a larger size that is acceptable to the NX1 data structure. I tried just altering the size in my Ethernet IP connections tab and creating the corresponding tags in the data structure and it resolved and transferred OK but then would not allow my IV3 sensor to go online and communicate via Ethernet IP. How can I resolve this?
-
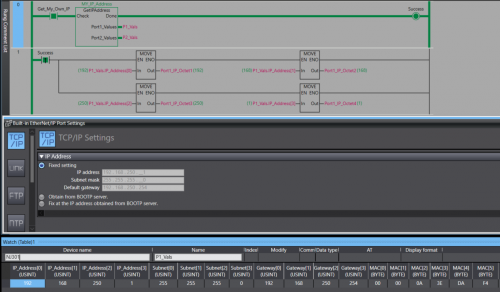
View File NJ/NX Get IP Address A Library containing a function Block that can be run on any Omron NJ or NX PLC. The Function Block will retrieve the host PLC's IP address, Subnet Mask, Gateway, and MAC Address. The Port Details are presented through 2 structures , 1 per-port. In the event the PLC only has one port the structure for Port 2 will be blank. Submitter photovoltaic Submitted 12/12/22 Category PLC Sample Code
-
Version 1.0.0
76 downloads
A Library containing a function Block that can be run on any Omron NJ or NX PLC. The Function Block will retrieve the host PLC's IP address, Subnet Mask, Gateway, and MAC Address. The Port Details are displayed through 2 structures , 1 per-port. In the event you only have 1 Ethernet port then the structure for the 2nd port will contain all 0s. Data Format: IP Address - USINT[4] Subnet - USINT[4] Gateway - USINT[4] MAC - BYTE[6] (hex value) Access the retrieved details by the typical parent-child tag structure. ex. Port_1_Detals.IP_Address[0] will get the first octet of Port 1's IP. Tested on: NX1P2, NX102, NX502, NX7, and NJ301 IMPORTANT: This Function Block should not be run immediately after startup. Allow the PLC a few seconds to establish a connection with the Ethernet network. -
Hi, I'm developing an application in C# and need to communicate with a plc omron NX1P2. How can i do it? With cx-compolet? Or is there another way?
-
Hello! Is there any FB for average value calculation? I did add Value to int every secend and devide it value by passed secends. Only problem is that by the time goes on int will be full?
-
Hi: Has anyone use Fins Command with NX1P2 (or any NX/NJ). I try with Multiway with "[!]: Command format error (1004)" Below is the command from multiway 800003000100000100060101820001000003 Data memory are define in global variable table as A as %D1, B as %D2 and C as %D3. The relevant setting are done on Fins Setting and Memory Setting in the PLC. Anyone ?
-
I am trying to get a G9SP taking over serial to a NX1P2 using a NX1W-CIF01. I have the details in Manual P545-E1 and it uses a example file which i am unable to locate OMRON_G9SP_SERI232_LD_EV100.SMC I have got the coms working with a CP1L using the example in Manual Z922-E1. I was wondering if anyone has the example file or a working example they can share for Sysmac Studio. The serial comms will take a little bit to get going but it is the code for the checksum for the sending data that i would rather not have to translate from CX Programer fort he CP1L to Sysmac Studio...... P545-E1-01.pdf.lnk Z922-E1-07.pdf.lnk
-
Hello! I have problem with nx1p2 SIL/pl rating. crane standard says, system have to be atleast (EN ISO 13849) PL D or (IEC 61508-1) SIL 2 rated. Did not found answer from the manual or google. Full Safety rated system is too expensive for this application. Long story short does anyone know SLI rating for nx1p2? Is there any SIL 2 rated cpu's?
-
Need help for making array and in data transfer
VulpesLago posted a topic in NJ Series / Sysmac Studio
Hi! I am new to plc-programming and i need few tips to finish my first project question 1: What is best way to convert bool's, lint, time and real into array? question 2: What i need to have for transferring that array into company's Http/web and how to do it? modem? Thanks for helping! -
Hi, I have to implement an axis control in a NX1P2 PLC using an inverter (3G3MX2) and an encoder cabled on a EC0122 board. I found something similar implemented on a CJ2M PLC, but I have no idea how to set up the axis in the configuration of sysmac studio and how to implement the control. Can someone help me? Some sample to catch out the configuration? Thanks a lot Andrea
-
Hi. I want to get the full date and time into the plc, where i want to calculate when current step and full sequence is expected to finish and then later present it back on the screen. I tried to map the _HMI_DateTime to the controller, but it does not get added to the controller.
-
Hi All, I am a new user to this Forum and definitely a newbie PLC user, so I'm not sure if this is a simple mistake. I am currently trying to correct the logic (of a sensor) on a PLC program to get a manufacturing machine back up and running. This is an issue that I have fixed via PLC several times previously, but for some reason I am having issues fixing it this time. The issue that I am having is that when I try to dig into the Logic of the PLC program (Programming > POUs > Programs > Logic > ...), nothing shows up where there is typically a PLC command ladder. I get the error "No instruction in rung" next to all of the PLC program modules. I am connecting to a Omron NX1P2 CPU via laptop & Ethernet cord. To give you background on my troubleshooting process, I have verified that the I am connected to the PLC controller, by using the Windows Run program to ping the IP address of the controller. After verifying connection, I attempted to connect to the controller using SYSMAC studio. At this step, a troubleshooting window appeared with the issue "Minor fault" "Tag Data Link Connection Timeout". When I look at the Controller Status at the bottom right corner of SYSMAC, it says that I am online and connected to the correct IP address (green circle). Under that, ERR/ALM has a red circle next to RUN Mode. Ignoring the troubleshooting window, I can click Synchronization and "Transfer from Controller". A dialog box pops up and reads "...Controller does not have the POU program source...". Pressing yes to ignore this, the transfer completes. This is where I encounter the issue of having nothing show up within the path of Programming > POUs > Programs > Logic > ... . I have a feeling that this is a connectivity or settings issue, but I am not sure. I have checked my ethernet splitter (D-Link DES-105) and everything seems to be connected and working. If anyone has some insight into this issue I would greatly appreciate any help. Thank you in advance! Best cszikszai
-
Connect by EtherCAT NX1P2 and Schneider Electric Altivar 320 (VW3A3601)
Covis posted a topic in NJ Series / Sysmac Studio
Hello, hardaware: NX1P29024DT1 (ver1.18), frequency inverter Altivar ATV320U07M2B (ver. 2.7 IE32) and communication EtherCAT card VW3A3601 I have a few ESI files v.109, 111, 113, 114 instaled in Sysmac Studio in ESI Library. I can not establish connection between NX1P2 and ATV320 by EtherCAT. In Network cofiguration I add slave with Node Address 2. The same Address is in ATV320 (ECAA and ECSA - parameters). When I connect both I see "Network Cofiguration Verification Error" Code 84220000 and black cross on diagram "Not matched" in Sysmac Studio. On the communication EtherCAT card in Altivar LED1 Green Filickering (Link, activity) but LED2 is OFF (EtherCAT state: INIT). I see in Altivar that parameter ECSS (EtherCAT slave status) INIT. If any one have experience with connection by EtherCAT NX/NJ with ATV32, 320, 340 ? p.s. The same communication EtherCAT card VW3A3601 I use for communication the same NX1P2 with serwo Lexium32M, of course with the appropriate ESI file for this slave and comunication is OK.

