
Search the Community
Showing results for tags 'encoder counter meter'.
Found 102 results
-
Hello All! This is my first post so please give my descriptions some lee-way please:P I am having trouble finding a solid example of ladder logic which integrates a: PowerFlex (755 in this case) Rotary Incrematal Encode ( or any encoder for that matter) A Prox to reset the resolution at specific points along the axis Also, can I use the standard Motion Instructions (MAJ,MAS,MAM etc) to control the movement sequences of the PowerFlex or are they only meant for use with Servos? I am working on automating a Lumber Treatment Process. The movements will have to move tens of thousands of pounds.. Therefore I would like to use the PowerFlex as a Torque Limiter to control a 15HP squirrel cage motor on a massive gear reduction. I have the distances and pulses per distance traveled from the mechanical engineering guys.. I'm just having problems integrating! After using the Setup Wizard for PowerFlex how can I go about actually inserting movement instructions for the drive into my ladder logic? Some more info on different movement profiles.. I've also included my attempt at trying to piece this together thus far.. Any input would be welcome! (StellaPLC) https://sites.google.com/site/lyncedrgb/eva/rslogix The actual drive and PLC are not available to be me at this time.. could this be an issue while trying to write this motion control program? (obviously not testing & troubleshooting portion) Tugger Speeds Freq. ACCEL TIME DECEL Time E-Stop Decel Torque % of max Notes VERY SLOW 15HZ 0.5s 0.5s 0s 100 SLOW 30HZ 1s 1s 0s 100 Restricted to slow speed within 3m of ends of transfer deck HAUL 60HZ 5s 5s 2.5S 100 Max torque limit 250% of FLA EMPTY TRAVEL 120HZ 2s 0.5S 2.5S 30 Torque Limited to 25%
-
Hi, I am planning to use an encoder on a CP1L to read on the RPM of a spinning wheel. For this, I can use high-speed counter 0, and the PRV2 instruction. My problem is that I also need the rotation direction. I was wondering if anybody had a tip for this? Thanks
-
Hi everyone, I need some help with my PLC programming. I am currently using a twincat 2 software and a Beckhoff CX 8090. Basically, the gist of my program is to send and receive data and datalog the input data received from the sensors and timestamp the received data for every 1 second. I want to create a boot up counter where it will count the number of times my data logging program has restarted(if it did). This boot up counter serves as a health monitoring check to ensure that my program is running perfectly and thus, not restarting randomly when it shouldn't. I am more familiar with structured text so if you have a solution, kindly post it in structured text form. Your help would be greatly appreciated. Best regards, DeadPool
-
Hi guy ! I have a problem with plc omron cp1e.Please every body help me. I was used high speed counter to count clock of encoder. And I want to count up/down pulse input case.But it not excuted.also if i use pulse + direction them it ok I used CX programmer. Thanks all
-
i am working on CTL (online cutter)i am using fx3g plc with 1024 ppr encoder i want to calculate MPM(METER PER MINUTE) in real time with the encoder can some one help me with the logic and how encoder work in frequency mode
-
Hi, I keep getting an error that project is in binary mode and plc is in BCD mode. Wont let me change either. I must be trying in the wrong place...please point me to where i can change this in the PLC. I am getting an error in my RXDU with a Honeywell barcode reader, on one machine, I am thinking it is related. thanks for any help.
-
Hi Everyone, I have a PowerFlex 525, in Velocity Mode with a Encoder Card "25-ENC-1". We are controlling this drive via TCP/IP with a 1769-L32. Through the PLC if I try to toggle the Bit for "Pos Redefine" in A560 [Enh Control Word] it instantly turns back to 0. But through the Parameter List Editor I am able to toggle A560. For My function I need to have the drive in Velocity Mode, If I change the drive to Position Mode I am able to toggle "Pos Redefine" Any Thoughts would be great
-
Hi: I urgently need a simple sample Counter Interrupt Program to study and implement with my machine. I am using GX Work 2 My Problem is inconsistent start stop of roller conveyor after pulse count (OUT_C_32, with cc235, using CC235 to stop a conveyor.) I have to try interrupt, but the manual sample is suck! Please help Tks
-
Hi, I need to use an absolute encoder to measure angle of turning object. I have to use S7-400 and a PVM14 absolute encoder. The Encoder support "PROFIBUS interface" and use "Class 1 and 2 in accordance with PNO profile 3.062". I am looking for example code, or a good manual. Any advice appreciated!
-

How to use analog values in SoMachine Basic?
mgn posted a topic in Modicon / Telemecanique / Schneider Electric
I'm using TM221CE40T PLC with TM3DI16 DI extension. I'm programming it using SoMachine Basic. In the program I implemented a counter (%C0). I've read in the documentation that %Ci.V stores the current count value. I want that to display this value on a Magelis HMIS5T. How could I store the current count value (%Ci.V)? Thanks in advance! -
Hello, The company that I work for wanted me to design and build a FIFO loader. For those who do not know what a FIFO loader is, it's basically a lift that runs up and down and filling up the magazine slots with pcb's. After I finish the mechanical part i'll try to program it by using a CPM2C - 20. I have already played with CX-programmer and learned my self a bit, for example how to program simple things such as AND and OR gates for controlling motors and lights. Really hard part for me was figuring out how to create a program that reads data from the encoder and use it to create positions which the motor will stop at, and i have not yet figured it out. I've been trying to google it without any luck, the only thing of real info i've got is a 650 page long pdf file or CX-Programmer manual which is hard for me to read since i'm new to all of this. Would be great if any of you people got any source or maybe a manual which are easy to understand for new beginner like myself. A bit about the program i would like to make: The FIFO loader will have some buttons for selecting different programs, lets say you press first button to select "program 1". Then the machine should move up and stop at posision "50" (there are 50 slots on PCB magazine) after it gets signal from pneumatic actuator (which will be used to shove pcb inside the slot) its should move to position "49" and so on.. If FIFO loader is located at "home" position and you press second button to choose "program 2", then it will move to slot "49", wait until it gets loaded, and continue to slot "47" and so on.. The meaning of this is to make a loader which can select a program to fit pcb's with different size of components.
-
hi: in Omron that is a command to count how many bit that are in ON state, any similar instruction in GX Work 2? Thanks
-
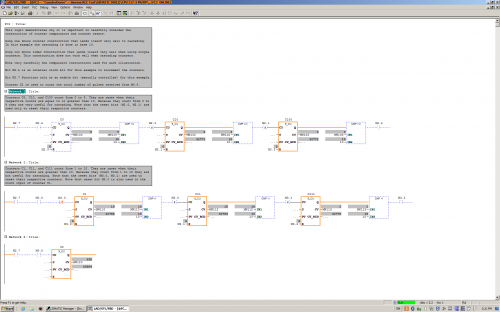
Version 1.0.0
208 downloads
This logic demonstrates the construction and cascading of counters that count from 0 to 9. This logic also illustrates the construction of counters that count from 1 to 10 (not useful for cascading). The difference is mainly in the comparators used to reset the counters. There is one small additional detail. Can you find it? -
View File FC3 Counter Demo This logic demonstrates the construction and cascading of counters that count from 0 to 9. This logic also illustrates the construction of counters that count from 1 to 10 (not useful for cascading). The difference is mainly in the comparators used to reset the counters. There is one small additional detail. Can you find it? Submitter pop29684 Submitted 03/24/16 Category PLC Sample Code
-
Hello, I hope you are all having a great Wednesday. So I was wondering if this is possible, and if so, how to do it. What I'm trying to do is get a real time speed of my hydraulic cylinder using a transducer, a 1769-HSC high speed counter module, and a 1769-L36ERM processor. Kind of like a speedometer in my car. I would like the number in inches/ second. We use a hydraulic proportional valve to control a cylinder that we use to pump molten lead into our die cast machines. Back in the day they used to use limit switched that rest on a tail rod attached to the cylinder shaft to get an approximate stroke length. It was very crude, but it worked for what it was. I'll explain a little more, in case I'm not explaining it very clearly. So on most of our machines the maximum stroke length of a normal shot is about 11". We have different "stages" to the shot. Stage one is typically from 0" (when the shot is all the way returned) until about 1.5", at 1.5" the valve stops and there is a shot delay for 1 second (vacuum draws some lead into the goose neck and into the beginning of the mold), after the delay second stage starts, second stage is from 1.5" to 4", third stage is from 4" to 8" and fourth stage is from 8" to 11.5" or until the shot timer finishes timing, and then another valve switches, and the shot starts it's return. We have the different stages because we typically shoot the cylinder slower at first, and then delay and then almost maximum velocity. We control the velocity with an analog output to a solenoid on a hydraulic valve. For example, for the first stage we may open it up 20%, then 0% during the delay and then 85% during second, third and fourth. Sometimes we play around with different shot delay times, different shot velocities, sometimes 3rd may be faster than 4th, ect, to get the best die casted parts. Anyways, so in the past they would use limit switches. One was a button head style that when the shot cylinder shaft was all the way returned, it made the switch, and we knew the shot was fully returned. One was set at 1.5", 4", 8" etc. They all, except for the shot return switch, were roller style limit switches. They were all made, and once the shot reached that stroke length, they would come off the rod and we would know we were in that next stage. So it was very crude. If you wanted to adjust the stages you would have to climb up on top of the very hot molten lead pot, mark where the limit switch currently was (in case you needed to put it back) loosen the bracket, try to make a measurement and guess how far you moved it. It was crude to say the least. Some of our older style machines that don't need much tweaking still use the limit switch style positioning system. Most of our new machines all use a VisiTrak transducer. The shot cylinder rod that is attached to the cylinder shaft is actually threaded and then has a very thing layer of chrome plating. The transducer sits against the shaft and counts the threads. It transfers those counts to a Very High Speed Counter module in our PLC I/O rack. We have a CompactLogix L36ERM processor and we use a 1769-HSC as the VHS Counter. Then we just do some math in the PLC program and we are able to get shot stroke in inches. We set different compare instructions, for example when: Shot_Stroke is greater than or equal to 0 AND Shot_Stroke is less than or equal to 1.5 then 1st_Stage_Bit is active. We set up different numbers for all the different stages and still use the button head limit switch as a second method to confirm that the stroke is fully returned. The counter is very fast. We are able to know what the shaft stroke is at any given point. We currently do some math using the distance of each stage and using timers to calculate inches per second of each stage. That way we can have a nice Speed number in inches/second that we can use to make different adjustments to the shot. Typically the first stage is about 7"/second second is: 24"/second third is: 42"/second and fourth is 2"/second. But I want a real-time, current speed, not just the speed that it traveled through each of the stages. Ok, after all of that explaining, I'm finally getting to my question. How would I logically write a set of instructions that could give me current speed in inches per second. Like i said, I am able to calculate the speed of each stage, after the shot has completed the stage, I just divide the distance of the stage (in inches) by the time it took to travel through that stage (in seconds). But I would like to have a real time speed, kind of like a speedometer on a car. Is this possible? I know that the scan time on this processor is very fast and the high speed counter module counts very fast as well. How do I do the math to get a real time speed in inches/ second? Sorry for the very long post. I just thought i would give you a background on what we are doing/ would like to do. Thank you very much.
-
Hello all, Let me start by saying that although I have been working with PLCs for 20+ years I am very (as in brand) new to the Siemens world (my wheelhouse is AB). That being said I have a Siemens S7-1500 (1511 specifically) CPU with a couple of SICK multi-turn Profi-Net encoders (AFM60A-S4NB018x12) that I need to talk to. - I am using TIA v13 with all of the updates. - I have the GSD file from SICK for the encoder. - I have no clue what I am doing - I can see the encoder values update in the watch table as I move the encoder. All fine and dandy so far... Here's where the white flag is going up.... - I am of the belief that there are existing function blocks out there 'somewhere' that can read and write to the base parameters. I have contacted our local rep who deferred me to SICK. I have emailed and left messages with them and have not gotten a return anything thus far. Here's our application... We are attaching each encoder to its own rotary gear mechanism. The rotary will need to turn in the CW direction approximately 400 degrees then return to its start point by rotating in the CCW direction by the same amount. If/When production/maintenance needs to 'rehome' the assembly, the expectation is that they 'pin' the drive in a known location then a bit would be set within the CPU that would assign a specific value to the encoder's actual position. In the SICK manual (8015078/YIX6/2015-01-16) on page 31 (section 3.6.3) there is reference to Preset control. This is what I believe we need to perform the aforementioned function. Does anyone have any examples that they could share on how to read/write to these encoders by use of a Function Block or other? Relatively desperate for help at this point. Can post test code if need be. Thank you in advance, TLAF
-
communication between energy meter, GSM,with twido plc
jaybhushan posted a topic in Modicon / Telemecanique / Schneider Electric
I need to make a setup like the readings in the energy meter should be a GSM then from this GSM the data should be sent to another GSM using Twido PLC.,please help me how to establish this connection. (Energy meter ----+ Twido PLC----+GSM) data from this should go to another similar set up (GSM----+Twido PLC---+Energy Meter) I dont know is this possible or not please help me,, -

CompactLogix using Analog Press Encoder
jrupp82 posted a topic in Allen Bradley / Rockwell Automation
I'll set the scene a little before I explain the issue that I am having. I have an application where I have a Linear Servo Slide acting as a Press Kick-off cylinder on a ceramic press. In order to trigger this Slide accurately, I have installed an Absolute Rotary Encoder (a Turck product) to the press, which outputs an Analog signal for its specific position. I then have this as an input into my CompactLogix L33ERM through a 1769-IF4 Analog Input card. Within my code, I'm trying to capture the moment where the press has presented the part out of the die and it can be ejected from the press cavity without damage the part. Mis-timing on this ejection and the part will clip the die pad tooling and incur damage upon ejection. Now, one last point of clarification, I am a Mechanical Engineer by trade, so I don't claim to be an expert programmer. But I have learned a lot and have gained experience in programming applications like this, so I can learn quick and should be able to program this task. I have had my local Allen Bradley guy look at the code I'm using for this application, and he thinks it looks good, but I'm still having issues. What I have done, is within the code, I have a window that I look for, of the encoder's position, to trigger the ejection shoe to fire its sequence and kick the part off. However, I have had to make this window so large in order for the code to see it every press cycle, that occasionally, the ejection shoe will be fired at the back end of the window, which is actually too late, and my part is being damaged. Attached is a snapshot of the code. The OkSamplePress.DN is actually a timer that I have that looks at the current press rate and puts a delay in to not allow the kick-off to fire too early, because I was actually getting a glitch before where the kick-off would fire prematurely for some reason. I don't know if anyone can offer assistance on this or not, but I would greatly appreciate any help at all. Its become quite frustrating, as the rest of my machine functions quite well, and this seems to be the nagging issue I can't get rid of. Thanks in advance...Josh -
Hello, I am not sure if this topic is too far from what the forum concerns, but any advice is greatly appreciated including reference to other reference. I want to know if any induction motor has internal encoder equipped. We are using servo motors, and additionally an encoder for position check. Because the position control resolution requirement is about 1 degree, I am thinking about abandoning servo motor, and to use induction instead. Servo motor has internal encoders for outputting pulse information. And I wonder, if there are induction motors with internal encoders. Thanks in advance. Ting
-
Turning inches traveled per pulse (a real number) to inches per minute
487mcgill posted a topic in Allen Bradley / Rockwell Automation
I am currently trying to get my program to take distance traveled per pulse, which is based off of the diameter, and convert it into IPM. I am using RS Logic 5000 software. If anyone could help me get over this hump I would really appreciate it! -
I need to replace existing encoder with quadrature output which is failing. We need to have minimum measuring distance of 60 inches. The encoder installed by manufacturer is Temposonics R-series RHS0650UMSO1Q1AC10 The resolution can be lower than the current encoder, probably 500 counts/inch or higher would be OK. Do you have any product that can be used? I was thinking about string encoder but I am open to suggestions.
-
Hi Good Day, I need a suggestion, I have an omron encoder, encoder counter meter (K3NC-NB1A) and communication card RS-232C 25pins (K31-FLK1). My question is, what is the best omron software to read and manipulate the data from the encoder (I have CX-one software but I only use CX-programmer). I want to capture the encoder pulse and convert to velocity, acceleration, deceleration and also energy absorbtion. I have to use mathematical formula such as two times differentiation. I also need to show grapf and display final result that is energy absorbtion reading. Or is it much simple if I use VB / labview / java software? Thank you in advance
-
I need help SSI Encoder with Micrologix 1400
Angel Valdez posted a topic in Allen Bradley / Rockwell Automation
I have a project where I need to use an SSI Absolute Encoder with a Micrologix 1400 PLC. I've never done this and need help. The SSI have a Clock and Data signals that are different from anything I've ever used. 1.Can it be done using the HSC inputs? 2. I found an AMCI card I could use but I am trying to keep everything AB and in the Micro Family. 3. I don't want to use Gray Scale encoders because of the number of Inputs I have to use. Trying to package a small enclosure and don't much room left. 4. AB sells an SSI encoder but they don't have any info on hooking up to anything other than Point IO module.(kills my budget) Thanks and any assistance would be greatly appreciated. ~Angel -
Hi I need to program my fatek fab Plc with the following : . I need to detect between a single long input or a repeated second pulse. The idea is to control a window blind with two outputs of the Plc and two inputs (one for up, from a up switch and another for down from the down switch). the blind should go up until I maintain the key pressed. But when I make a repeated two pulse on the key it should go up automatically during a certainly define time (enough to completely open the blind). The same for the down direction. I need help on that.
-
i am using CP1E cpu . i wants to use increment counter . if i use CNT instruction it was counteing decrement count . anybody can share the instruction for same satheeshkumar




