
Search the Community
Showing results for tags 'nj301'.
Found 7 results
-

NJ301-1100 primary task timeouts after add EDS of Cognex scaner
aleksander posted a topic in NJ Series / Sysmac Studio
Hi I am new in Omron, most of time I spend with Siemens products so that's why I shyly want to ask about communication over EthernetIP in the case of PLC Omron. I am working with not my machine with PLC NJ301-1100 where are 3 axes on EtherCat, no nodes on Ethernet/IP, only HMI NA5. Primary task with cycle 500us (and additional periodic task 10ms but it is not important). I want to add Cognex scaner on EthernetIP. I use SysmacStudio. In first step I add EDS file and two structures IN (80bytes)/OUT(80bytes) to PLC, no algorythms. After downloading changes to machine in a while it stops with PRIMARY TASK TIMEOUT. With original program the task execution is ave 394us, max 467us. For NJ301 adding 160bytes is additional around 100us to communication cycle. Is that cycle part of each task (primary and others) or it is parallel proces? I am little confused. Additional communication time is 160*0,0015 + 160*0,56 + 2,15 + 7,5 = 99,49us. Am I correct? And this is the problem, I am out of the range of WatchDog? For now I didnt add any algorythms. In the future I will add new periodic task to PLC and this new InOuts will not be used in primary task. Thank You for any advice. ps I have found option for my inputs/outputs REGISTER TO SETTINGS FOR EXCLUSIVE CONTROL OF VARIABLES IN TASK. I created and chose new periodic task for them. Will it helps? I won't be able to check it until Monday so if You have any advices I will be gratefull ;) Best regars! -
Following my post from yesterday and the fix proposed by @chelton, I went ahead and expanded the solution to multiple PLCs in the shop. Now I'm stumbling on another layer of difficulty : I have to RECV in a CP1L-E (10.1.14.214) from a NJ-301 (10.1.46.118). Both PLC's are physically connected to the same Ethernet Switch in the shop, but the IT guys decided to add a new subnet for PLCs and equipment some time ago. I read Michael Walsh's answer on this post but I couldn't figure out how to set things up properly with 2 subnets that are not consecutive. What do I need to setup in the CP1L-E to be able to RECV properly? There is certainly a routing table setup that I need to add but I cannot figure it out by myself. Here is the current setup : In the NJ, I have a UINT variable mapped At %W0, Network Publish set to "Output" The RECV command in the CP1L-E is as follows: C0 = 0001 (1 word) C1 = 0001 (Port 0, network 1) C2 = 7600 (node 118, unit address 0) C3 = 0203 (port 2, 3 retries) C4 = 0032 (5 sec timeout) The Built-in Ethernet parameters in the CP1L-E are attached Thanks !
-
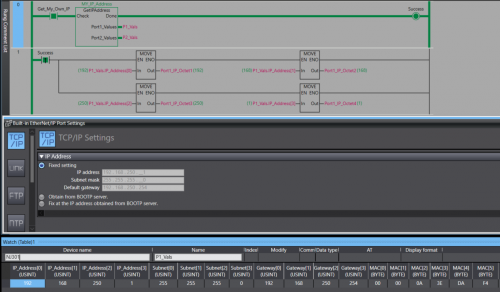
View File NJ/NX Get IP Address A Library containing a function Block that can be run on any Omron NJ or NX PLC. The Function Block will retrieve the host PLC's IP address, Subnet Mask, Gateway, and MAC Address. The Port Details are presented through 2 structures , 1 per-port. In the event the PLC only has one port the structure for Port 2 will be blank. Submitter photovoltaic Submitted 12/12/22 Category PLC Sample Code
-
Version 1.0.0
76 downloads
A Library containing a function Block that can be run on any Omron NJ or NX PLC. The Function Block will retrieve the host PLC's IP address, Subnet Mask, Gateway, and MAC Address. The Port Details are displayed through 2 structures , 1 per-port. In the event you only have 1 Ethernet port then the structure for the 2nd port will contain all 0s. Data Format: IP Address - USINT[4] Subnet - USINT[4] Gateway - USINT[4] MAC - BYTE[6] (hex value) Access the retrieved details by the typical parent-child tag structure. ex. Port_1_Detals.IP_Address[0] will get the first octet of Port 1's IP. Tested on: NX1P2, NX102, NX502, NX7, and NJ301 IMPORTANT: This Function Block should not be run immediately after startup. Allow the PLC a few seconds to establish a connection with the Ethernet network. -
Control Powerflex 525 with NJ301 with Ethernet/IP
ragzz1995 posted a topic in NJ Series / Sysmac Studio
Hello All, I would like to control Powerflex 525 drive with Omron NJ301-1200 PLC via Ethernet/IP (Set speed, start, stop). I've gotten until the part where I downloaded the necessary .eds files of the drive and imported into my Sysmac studio. However, I'm stuck after this point while assigning target variables and Originator variables and eventually setting speed and controlling the vfd. I've attached images for your reference. -
Dear, I am trying to setup an UDP connection between my Omron NJ301 PLC & my LED power supply CCS PD3-10024-8-EI (https://www.ccs-grp.com/products/model/3329). My setup: I Close all used sockets. I SktUDPCreate Socket 1 for sending messages. I Fill in DstAdr & DstPortNo to 192.168.000.002 & 40001 (I have pinged with cmd and the IP adress does respond). I Fill in the sendstring with "@00E01172.016.110.007A2CRLF" as per manual. I SktUDPSend this string. I clear the receive buffer to be sure it is empty. I Create socket 2 for receiving messages. I tried filling in only the Dst and filling in both Dst and Src but it has the same result. (DstAdr 192.168.000.016 & DstPortNo 30001) I SktUDPRcv without error then used a TON for 10ms before I check my buffer I Check my receive buffer and it is empty (Size 0) When trying to ping (by using laptop in same network) 192.168.000.016 it automaticly tries to ping 192.168.000.014 without succes. So my question: Is there another way then using 2 sockets? And does anybody have any clue what I'm doing wrong?
-
Hello All I am new to sysmac studio, i am using a NJ301-1200 and R88M-KN10H servo drive , i connected the servo to the NJ using ethercat. I was able to write a program where i was able to activate the servo from the NJ using the mc_Power instruction . My question is , i am not able to run the servo using the mc_movevelocity and mc_moverelative . Do any one have any suggestion to how to go from here ..
