
18 files
-
FC3 Counter Demo
By pop29684
This logic demonstrates the construction and cascading of counters that count from 0 to 9. This logic also illustrates the construction of counters that count from 1 to 10 (not useful for cascading). The difference is mainly in the comparators used to reset the counters. There is one small additional detail. Can you find it?
208 downloads
Submitted
-
FC2 Toggle a bit
By pop29684
This logic demonstrates how to use a condition to toggle a bit. Any bit-level condition may be used such as I, O, M, C, T, DB. Only two rungs of logic are required.
169 downloads
Submitted
-
FC1 Two hand anti tie down
By pop29684
Logic takes two inputs (I0.0, I0.1), debounces each (T0, T1), looks for actuation during a timed period (T2), and provides validation (M20.0). This logic is not designed, nor intended, to replace the use of any OSHA required two-hand safety control relay. It is provided for the sole purpose of it's educational value.
131 downloads
Submitted
-
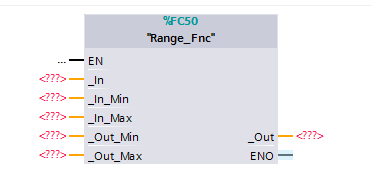
Range_Fnc
By Bryll
I sometimes need to scale an analog value, so I had to do a function to better suit my needs than Siemes "Scale" function.
It has 5 inputs, all in integer format.
_In - The value to be scaled
_In_Min - Lowest value of the "_In" signal.
_In_Max - Highest value of the "_In" signal.
_Out_Min - Lowest allowed value of the scaled output.
_Out_Max - Highest allowed value of the scaled output.
The output "_Out" is the calculated value in integer format.
Edit.
It's saved as a global library.
TIA Portal V13 SP1 Upd. 4
283 downloads
Updated
-
Solve system whit Gauss-Jordan
In the matrix A [ i , j ] put the System of N-Equation.
In the vector b put the solutions
§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§
Example 1: Linear System 3 equation (X,Y,Z)
3 X + 2 Y - Z = 10
- X + Y + Z = -2
2 X - Y + 2 Z = -6
| 3 | | 2 | | -1 | | 10 |
X | -1 | + Y | 1 | + Z | 1 | = | -2 |
| 2 | | -1 | | 2 | | -6 |
Matrix A :=
Matrix[1,1]= 3 ; Matrix[1,2]= 2 ; Matrix[1,3]= -1
Matrix[2,1]= -1 ; Matrix[2,2]= 1 ; Matrix[2,3]= -2
Matrix[3,1]= 2 ; Matrix[3,2]= -1 ; Matrix[3,3]= -6
Vector b:=
Vector[1] =10 ; Vector[2] = -2 ; Vector[3] = -6 ;
Solution :=
Solution [1] := 1.0 ; Solution [2] := 2.0 ; Solution [3] := -3.0 ;
X = 1 ; Y = 2 ; Z = -3
§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§
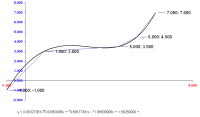
Example 2: Linear System 5 equation for resolve Polynomial 4th grade
exampl. Polynomial whit 5 points:
P0(-1,-1) ;
P1( 1, 3) ;
P2( 5, 3.5) ;
P3( 6, 4.5) ;
P4( 7, 7) ;
Write in the Matrix A [ i, j ]
Matrix A :=
Matrix[1,1]= (-1)^4 ; Matrix[1,2]= (-1)^3 ; Matrix[1,3]= (-1)^2 ; Matrix[1,4]= (-1) ; Matrix[1,5]=1;
Matrix[2,1]= (1)^4 ; Matrix[2,2]= (1)^3 ; Matrix[2,3]= (1)^2 ; Matrix[2,4]= (1) ; Matrix[2,5]=1;
Matrix[3,1]= (5)^4 ; Matrix[3,2]= (5)^3 ; Matrix[3,3]= (5)^2 ; Matrix[3,4]= (5) ; Matrix[3,5]=1;
Matrix[4,1]= (6)^4 ; Matrix[4,2]= (6)^3 ; Matrix[4,3]= (6)^2 ; Matrix[4,4]= (6) ; Matrix[4,5]=1;
Matrix[5,1]= (7)^4 ; Matrix[5,2]= (7)^3 ; Matrix[5,3]= (7)^2 ; Matrix[5,4]= (7) ; Matrix[5,5]=1;
Write in the Vector [ ]
Vector b:=
Vector[1] = -1 ; Vector[2] = 3 ; Vector[3] = 3.5 ; Vector[4] = 4.5 ; Vector[5] = 7
Solutions :=
Solution [1] := 3.27380234e-003 ; Solution [2] := 0.03363105;
Solution [3] := -0.56577414 ; Solution [4] := 1.966369 ;
Solution [5] := 1.5625005
§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§§
Example 3: Linear System 6 equation for resolve Polynomial 5th grade
example. Mototion Interpolation whit Polynomial
whit 2 Points :
P0 (Time0, Position 0) Start point whit (Velocity 0, Acceleration 0)
P1 (Time1, Position 1) End point whit (Velocity 1, Acceleration 1)
Write in the Matrix A [ i, j ]
Matrix A :=
X0 = time0 ; X1 = time1
Row1 X0 ^5 + X0 ^4 + X0 ^3 + X0 ^2 + X0 + 1 (Position P0)
Row2 5 * X0 ^4 + 4 * X0 ^3 + 3 * X0 ^2 + 2 * X0 + 1 + 0 (Velocity P0)
Row3 20 * X0 ^3 + 12 * X0 ^2 + 6 * X0 + 2 + 0 + 0 (Acceleration P0)
Row4 X1 ^5 + X1 ^4 + X1 ^3 + X1 ^2 + X1 + 1 (Position P1)
Row5 5 * X1 ^4 + 4 * X1 ^3 + 3 * X1 ^2 + 2 * X1 + 1 + 0 (Velocity P1)
Row6 20 * X1 ^3 + 12 * X1 ^2 + 6 * X1 + 2 + 0 + 0 (Acceleration P1)
Vector b:=
Vector[1] = Position P0 ; Vector[2] = Velocity P0 ; Vector[3] = Acceleration P0 ;
Vector[4] = Position P1 ; Vector[5] = Velocity P1 ; Vector[6] = Acceleration P1 ;
Interpolation Polynomial Position :=
Position := s1* t^5 + s2* t^4 +s3* t^3 + s4* t^2 + s5* t + s6;
3268 downloads
Updated
-
Updated
-
S7-200 Tips & Tricks Complete 8/2003
By Crossbow
Complete archive of Tips and Tricks for S7-200
35121 downloads
Updated
-
PDF: String Parsing
By CGehlhausen
Sample code for Parsing Strings - in this case taking incoming comma separated variable strings and breaking them apart.
4542 downloads
Updated
-
PDF: Traffic light.
By JesperMP
Traffic light.
No usage of "reusable code".
Just plain classical PLC programming printed in LAD (ladder)
13891 downloads
Updated
-
PDF: Reusable code with FBs.
By JesperMP
Example of how to create reusable code by means of Function Blocks and the associated Instance DBs.<br /><br />Note that it has been printed in LAD (ladder). <br />Some code cannot be viewed in LAD which is why it defaults to STL (statement list).
5767 downloads
Updated
-
modified traffic lights
By bapi
This program is a little modified version of the earlier traffic code. This program also has the comments added which was missing in the earlier version.
6480 downloads
Updated
-
Dip paint
By bapi
This is a simple program to paint an object while the object is transferred from Station A to station C. The painting occurs in station B where the object to be painted is stopped and dipped in paint and the moves further to C. From C the transport system comes back to A without stopping on its return path at B.
If you have any doubts or suggestions please feel free to contact me .
3114 downloads
Updated
-
drill machine
By bapi
This is a simple program where the drill arm moves down for the drill and the Drill motor starts as well. The drill arm stops after reaching the bottom level but the drill motor continues for a few seconds to ensure a good drill and then stops. Now the Drill arm moves up again and then reaches the top position and starts the cycle again.It is aslo ensured that the Drill arm is always at the top before the operation starts or if the drill operation is stopped in midway.
If you have any doubts or suggestions please feel free to comment.
7053 downloads
Updated
-
Remanent On-delayTimer for S7-300/400
By baa
Remanent On-delay Timer for Siemens S7 300/400
-The attached FC makes standard PLC timers
remanent.
-The timers are started stopped and reset via
digital inputs.
-The the remaining time can be monitored in the
program.
5988 downloads
Updated
-
Daylight Savings Time for S7-200
By Crossbow
This is a quick sample program to demonstrate how to make the PLC adjust the clock for daylight savings time automatically. It's done with an S7-200 but the logic sould be similar for any PLC from any vendor.
Written with Step 7-MicroWIN/32
5114 downloads
Updated
-
Analog Average
By Chris Elston
This file for Siemens 200 PLCs will create a rolling average of the last 100 scans worth of an analog input.
7442 downloads
Updated
-
Updated
-
Knife Example Program
By Keith Menges
Cut off knife example program. Uses Profibus communication and indirect addressing examples.
11560 downloads
Updated