
Search the Community
Showing results for tags 'autotune'.
Found 5 results
-
Hey guys I am strugeling with how to code a autotune algorithm in Gx Works 2 structured text. Does someone have any useful information or code to lend me, this is for a school project please help
-

[PLC Sample Code] - Sysmac Studio Simple PID Example
photovoltaic posted a topic in Download Comments
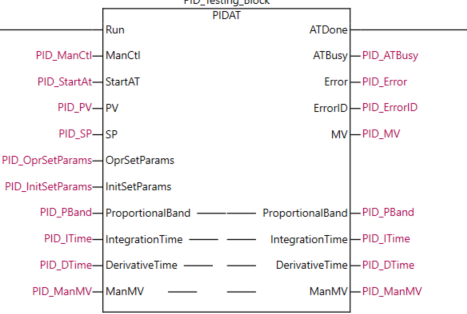
View File Sysmac Studio Simple PID Example A simple test program and starting values for the PIDAT instruction in Sysmac Studio. Simply run the simulator (Simulation-> Run) and toggle the Test_PID bit. Simulated feedback will allow the loop to operate normally. The setpoint can be adjusted by modifying the PID_SP variable. There is a pre-programmed data trace that traces the SP, MV, and PV. To use the data trace navigate to DataTrace0 and start the trace, flip the Test_PID bit true and the trace will log 10k samples. Submitter photovoltaic Submitted 02/13/22 Category PLC Sample Code -
Version 1.0.0
62 downloads
A simple test program and starting values for the PIDAT instruction in Sysmac Studio. Simply run the simulator (Simulation-> Run) and toggle the Test_PID bit. Simulated feedback will allow the loop to operate normally. The setpoint can be adjusted by modifying the PID_SP variable. There is a pre-programmed data trace that traces the SP, MV, and PV. To use the data trace navigate to DataTrace0 and start the trace, flip the Test_PID bit true and the trace will log 10k samples. Change the SP and view the behavior when the trace finishes. -
Hell PLC World! I have been trying for several weeks in my spare time at work to tune an Allen Bradley Servo Motor. Below is the list of hardware I am currently using: - CompactLogix Motion Controller (1780-L33ERM) - Kinetix 350 Driver (2097-V34PR5-LM) - MPL Series Rotary Servo Motor (MPL-B310P-MJ74AA) I have been using RSLogix5000 for testing and I plan to use it to develop a simple conveyor type program later. I have tried a list of things which will be below, but to no avail, I cannot simply jog the motor for any period of time without triggering a position, velocity or bus voltage error. I have tried changing the motor, driver and feedback cable to no avail. Here is the process I have used: 1) Add the hardware to RSLogix5000 (PLC, Driver and Motor) 2) Configure the motor 3) Run the hookup test. This works flawlessly. The motor will slowly turn independently on the feedback test for as many revolutions as I input. This is what makes me think I am doing something wrong in the tuning process. 4) Run autotune process with the velocity, acceleration and jerk set well below the limits of the hardware. 5) Attempt manually control motion 6) Recieve error I have tried changing the input from trapezoidal to S-Curve, changed velocity and position limits, manually tuned velocity gains in a myriad of configurations. I have swapped legs on the 3 phase input (which made matters worse). I suppose it is possible that multiple pieces of hardware are faulty because this equipment was previously used, but I still cannot wrap my head around why the hookup test would work so flawlessly, yet I cannot just get the servo to rotate at an equivalently low speed. If anyone recognizes my mistake, I would be eternally grateful. I am an intern studying control systems in graduate school and as popular as AB is, I would sure like to get some experience with it. Thanks in advance!
-
Dear Experts!!!! Can you tell me the complete clear cut procedure of PIDE autotune functioin And plz tell me when i shoukd do it ??? I.e. when the set point near the actual or when its far away and reaching to the SP. Can't i do it in FBD in Auto mode : If yes then how??? Have to put FBD Block in manual mode always???? Any other way to autotune it???
