

collinsd70
MrPLC Member-
Content count
264 -
Joined
-
Last visited
Posts posted by collinsd70
-
-
I have used the SA85 card quite a few times and have found it to be very easy to set up and also very reliable. As far as im aware these can still be bought from Schneider and have used on Windows 7 without issue- you will also need the MBX Suite which is inclueded in the package.
I have used it in connection with Wonderware InTouch via the IO Server.
I guess you could always use the Anybus gateways that convert Modbus Plus to/from other protocols. I have used these to convert to Profibus and again; found it very simple to use.
-
I always thought you could read from the PLC's internal memory- but the code is always presented in MELSEC Instruction List.
-
Hi PaulKim.
A quick google search via your error code indicates your RSLogix 5000 Installation maybe corrupt, have you tried opening another project to see if it is a program-related crash?
The common fix seems to be completing a repair of the RSLogix 5000 Installation from the Control Panel --> Programs and Features
-
Could you not write the data from the extra PL'C's into the currently used PLC (using passive and consumed tags) then just port these into the slaves data area?
-
What version of the DA Server have you installed?
-
I have used both the Prosoft and Anybus converters.
My general experience of both is that they were reasonably easy to set up- I was using Profibus and Profinet to talk to Modbus Plus and Modbus TCP Protocols (Anybus) and Profibus to Ethernet/IP (Prosoft).
To setup in Prosoft- you will need the software Prosoft Configuraton Builder. In prosoft the address ranges, data length etc are all entered into the config file. Obviously in your PLC software- you will need to configure the node with the correct data lengths etc.
This may vary depending on the protocols used (I can only vouch for the modules I have used).
-
BabyBlue10.
You need to write some level of user program to control this module and handle additional information you require.
When your starting the modbus card from the configurator tool- in effect it is toggling the start bit (as we said earlier 'Y4'). Writing this sort of command into your program saves you from starting in the configurator tool every time the CPU is reset or the Card stops.
This is a standard protocol across most of the Q-Series intelligent modules.
-
Randy.
Depending on the platform...I do believe some controllers log this information in the PLCs internal buffer memory.
Using the GSV block- this information can be retrieved from the controller.
-
I also found out that you cannot go back versions...
ie from a L60 v17 to an L55 v16 is not possible.
I just read the release notes on RSLogix 5000 v17 and it does indeed note the introduction of import/export as .L5X extensions.
-
Thanks Joe.
Im sure you appreciate how painful it is not being able to import pre-made Routines and UDTs.
In theory I will now have to write everything again.
-
Hi Joe.
Thanks for your response...
I have had a closer look into this tonight and have established the following...
I normally inport export routines/tasks by right-clicking on the main task and selecting import in the controller organizer.
If I select a CPU with a revision of v17 or higher- this function becomes available. If I select my L55 CPU with max version 16; this function disappears.
The conclusion appears to be; that a minimum version of 17.0 is required to enable this function with RSLogix 5K.
Can anyone confirm this? From a software perspective- I cannot see why this would be relevant.
-
Hi All.
For some reason when I create a project for the above CPU in either RSLogix 5000 or Studio 5000 I cannot import or export routines or UDT's.
If I choose another CPU (with the same revision) for example- this function becomes available.
Revision 16 is the final version release from Rockwell for this type of CPU.
Any ideas? I would have thought that this would be a restriction in the Software (as its compiled here) rather than the CPU Type?
-
Im not necessarily referring to the present time- I mean historically...
When I come across these sitautions- im always asking myself this question.
-
Agreed...however.
I have worked in many situations now where a robot cell is supplied to customers- all remote I/O is on Profibus, all Robot Controllers are Profibus Slaves, all Safety is handled via a dedicated Safety PLC via Profibus.
Depending on the customer- they may request Siemens, Mitsubishi, sometimes Schneider (Quantum). However if a Customers Requests AB- then there is no simply transition like with the other vendors above where a PLC must act as Profibus Master. Obviously there are ways around this.
Mitsubishi for example- have there own networks (MelsecNET (H/10) and CC-Link) but still provide access to other protocols such as Modbus, Modbus TCP, Devicenet, Profibus and Profinet.
From a sales aspect- it just seems odd that AB doesnt have any method of getting into these sorts of markets like the example above.
-
Hi All.
Just a random question- does anyone know why Allen Bradley don't directly support protocols such as Profibus?
I am aware that SST modules can be used- but coming from a Siemens/ Mitsubishi/ Schneider background, all these companies do...
-
Hi Lurby.
You could use a simple multistate indicator with an expression?
In your situation above- you could have a simple 2-state indicator like 0=Open and 1=Closed or you could take it up a notch and provide strings for ‘opening’ and ‘closing’ also (and make it a 4-state for example).
-
If you have access to predefined Mitsubishi Functions- you can also use the conversion to Bit Array- this is what I normally use, then specify your Tag[x] where x is the position of the bit you wish to analyse.
Here is an example for a 16-Bit Integer
-
The other way to do this is to make the initial connection with USB via RSLinx and configure this way.
Establish the connection via USB- downlod your program- then right click on your ethernet module in the controller organizer.
Once you have done this- there is an option to assign the IP address (think its the 2nd or 3rd tab along), unlike BOOTP- you dont need to disable anything afterwards.
-
Thanks Jobbe9000.
I have had a better look now- removing the globals COORDINATE_SYSTEM and followed through errors. I now need to instruct the motion axes individually and reassign all calculated "angles" that the Cartesian was driving to.
-
Hi All.
I have been given a new program to engineer- the original code used 2 axis in a Cartesian co-ordinate system to allow for different angles of drilling. All done via Kinetix 2K on SERCOS II
These axis are now to be individually isolated- and the angle is adjusted by the operator now.
I need to remove the coordinated motion group- if I just simply "delete" this- do I need to be weary of anything else?
Are there any dedicated coordinated motion instructions that need removing/ adjusting?
Thanks
Dan.
-
Babyblue10
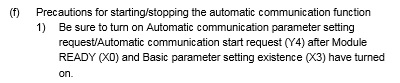
According to the QJ71MB91 User Manual- your start request is sent via Bit 5 so at starting X/Y 0000- your address will be Y4.
See the attached diagram which shows your process flow and signals to analyse.
Cheers.

-
I am using Kinetix 350’s...
The firmwae version is very low (v2.xx I believe) so may explain why I dont have the functionality to disable/ enable these.
The machine is being shipped Friday wired as is- but thanks to everyone for their feedback.
-
This problem was caused by logic in different cyclic priorities handling the same Boolean.....was very hard to find (thanks to the Trending facility for helping me debug this).
1 person likes this -
Hi Joe.
Yes I completely agree that it was most likely being controlled from another part of the program- however the system is now fully commissioned and this problem no longer seems to exist
This project was developed from a "standard" piece of code (I use the word "standard" very loosely)- and thus; have spent about 80% of my time (roughly 4 weeks) debugging lots of different problems in this piece of code rather than improving my motion logic; written for drilling control.
Modbus Plus to PC
in Modicon / Telemecanique / Schneider Electric
Posted
There is also a USB --> Modbus Plus box that can be used just like the SA85 PCI Card, I only used one of these on testing but have heard they are very expensive.