

lamboom
MrPLC Member-
Content count
185 -
Joined
-
Last visited
Posts posted by lamboom
-
-
Thanks Crossbow - always a big help
")
-
Wow! Thanks all for the great input. I suspected something was goofy with the data types...
Berti Baker - I could swear I read the data types for FOR had to be "REAL" .. I'm gonna go back and find it again...Thanks
BobB - I thought that too.. so I changed it to Just "A" .. an' got the same result .. (again wrond data type) .. back to the books...thanks
Michael Walsh - again, you have made my life happy... Thanks... again ...
PS; Is this really the best way to create a sine wave motion? methinks, it's over when we get to 360 ... what if I would like it to continue forever?
-
Hi... Trying to keep it simple:
Want to make a G5 incremental motor wiggle, CW/CCW in a sine wave motion, Thought this might work:
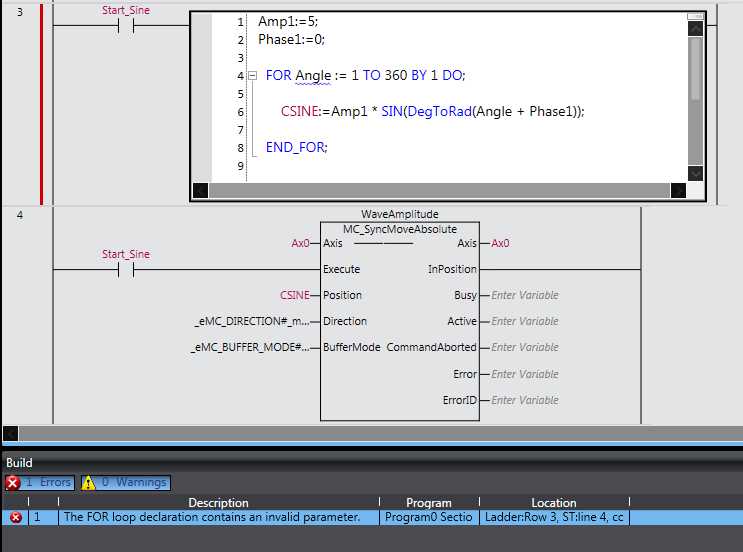
The variable, "Angle" is REAL, Phase1 is REAL, AMP1 is LREAL, CSINE is LREAL .. Sysmac doesn't like "Angle" in the FOR statement .. Anyone know why..?
Thanks Much, Regards, Michael
-
Actually.. everything is not working properly .. recently, the Auto-Updater , or someone else wants to "Configure" Sysmac.. actually, it's Windows that wants to make some sort of adjustment to Sysmac every time I launch a project:
I let this window have it's way.... once ... even tho it took a long time to fill up .. then, it asked me to load the DVD.. Which I did.. then it took even longer .. and finally changed the window to 60 Min. Remaining... then after a minute .. 70 Min Remaining .. when it got to 112 Minutes remaining.. I clicked "Cancel" ... It went about undoing itself.. then started again from the beginning... I Canceled again.. it launched a third window starting again.. and I Canceled again... It only does that routine 3 times...
I checked with Auto Installer.. and get this:
After loading data, this window pops up stating that Sysmac is Up-to-Date ... Really... then what's going on with "Windows Configuring Sysmac Studio????
-
Thanks... You're a wonderful person... don't ever change....
-
Hi Crossbow... I'm Joking!.. I always assume I'm not being insulted ('tho I probably deserve it) .. And.. Yes it should be in the manual... There's a lot that should be in the manual... But.. It's a good manual ... I'm always afraid the members are going to think.. why doesn't this nube use the manual ... sooooooo .. I was just accepting a perceived challenge to "find it"
Please take no offense .. I love you ... really!
-
What are you saying here Crossbow.... ? Did you mean to say: "It should be mentioned in the safety section... but it isn't." ... Or, If I had looked, I would have found it in the safety section of the manual. ? Sounds like you may be impugning my ability to find specific information in the hundreds of thousands of Omron's pages. I admit it ... sometimes, it's all I can stand, I can stands' no more. when it comes to "finding" things in the Omron manuals ... The search function is a life saver... In this case, it didn't help. I might go look again, if this is a challenge.. I accept it!
-
Hi Crossbow... Thanks... Actually, I think I do need to see it... or at least a cycle count that increases with each count by 1*CycleTime... Time is an element in the equation. Without time, the Frequency or Period of a sine wave could not be constructed. Time must be in the calculation. Is it perhaps just a system global variable? Easily, called, normalized to zero, and modified by each "cycle time"?
Perhaps I won't care about the "Process Time"... because it must fit inside of the cycle time... If the cycle time is 1ms, Time would start at zero with the first cycle, and increase by 1ms for each additional cycle.. until the sequence is stopped.?
OK .. I get it. The cycle time is fixed. (1ms, 2,ms or 4ms) but, Omron doesn't count the cycles, I'll have to. Thanks again.
-
I would like to use the actual Cycle Time (in seconds) of the NJ101 CPU in a Structured Text math equation. You might also call it the Task Period... However it's called, It needs to be the amount of time that has elapsed from the last calculation of the ST math equation. It must be a variable that also satisfies this looping equation: Time:= Time +cycle time .. so that the master equation, which is calculating position information, based on TIME .. is up to date with each calculation in the loop.
How do I insert that cycle-time, which might not be identical for each loop, (or, is it) ? Thanks, Regards, Michael
-
In Part One of the Question: "Can the Omron NJ CPU make the Random Sea?" There were some fine opinions about that. This example is what it looks like using Red Lion, Delta Motion RMC75E and LinMot: https://www.youtube.com/watch?v=SQd6YzBWVvI
Recent edit: The "Big Trycky Omron Question was asked many, many times not shown on this Forum. I had a very difficult time getting a straight answer from many people at Omron and LinMot. Probably because they really never tried to do it. By the end of THIS thread ( part2 ), Thanks to innoaloe I know that the NJ can generate the position signal, as streaming position data with no time limit, and produce a "randomly" generated model of the ocean's surface. The "random" part isn't added yet, but, it will work... and the LinMot part isn't added yet .. and it is still unknown if that will work.
-
Crossbow ... yes... I've read about that.. then they recommend that a Omron engineer comes out to your factory and does the upgrade for you .. because if you screw up.. you now have a nice doorstop ..or "brick" which is what they used to call a failed BIOS update... on a PC
-
Tom_b_ie -- Hi.. I wish I did.. Looks like a great source for everything! I'll see if I can find them
-
Michael- Thanks for the info
Someday.. I may have the guts to attempt a firmware upgrade of the Nj101 -1000 .. I hope it will be good enough to test the final project for what I need.
-
Hi Michael ... Having a great time building the HMI and CrossBow's IAG objects...
Added Jogging an' the Start Moving button .. and linking everything I can to CrossBow's lamps
Started to synchronize an' install into my system.. and, shock and horror ! ... your project is V1.13 ... an' my Nj is V1.1 ... hmmmm... Now that we're on that subject.. I've never been able to understand what's going on with the version selection when creating a project... ... I changed the version to 1.1 .. Still wondering what the point of the project version setting is.. Seems like .. Sysmac ought to know what the version of all the devices is .. and automatically adjust what ever it needs to be able to work with them....
-
OK... I'll have to send you both pizza!
-
Michael - Thanks again.. you have made it very clear. The Manual (W507-E1-14) does a reasonably good job with the homing of an Absolute G5 .. I suspected I could use the Home Proximity (toggle switch) .. click it while the motor was searching... then it would go to where ever the z-pulse was.. an I would call that Home. But I didn't see any place to put the proximity signal .. Your comment in the ladder program .. basically said the home position would be where ever the motor was when powered on... Which is fine...
I just didn't appreciate how to use the "home proximity signal" .. if I wanted too (kinda still don't understand how to use it) Does that "input" show up on the input side of the "Home" function block .. If you chose something other homing mode? Because, I just don't see where the "signal" connects to the Function block for homing .. or... perhaps it doesn't .. it connects to the servo drive?... hmmmmmm.
-
On 2/10/2017 at 11:47 AM, Michael Walsh said:Michael- Sorry I didn't remember your comment about the incremental motor.. you did say this project was for the absolute encoder... I didn't know what it had until just before I sent you a message. I would like to talk about the options for using "incremental"... the end position isn't so important ... it could home anywhere... I just need a "initial position".. called zero .. that the motor could move CW and CCW from a streaming solution of a random position signal.. which is the summation of many sine waves.
-
Thanks Michael ... I've loaded your project and .. thanks for using the NJ101-1000..
had to change the drive to R88D-KNA5L-ECT which is controlling a 50Watt G5 motor. Is that a 1S motor? The project is very basic.. I especially like that.. but, no global variables! GADZOOKS! that's almost too easy .. I do have to create a project on the NA, would prefer to run it that way.. I've installed an IAG file:
just the servo monitor part
Would like to try and use it .. will add a FB for jogging too.. if I can. All of the variables are internal .. which suggests I/O's .. I think I will try and create some Globals, and the HMI with the IAG .. you will certainly hear from me if I fail.. and if I succeed... Thanks again....

-
Michael ... that would be awesome! I assume I'll need CN-1 I/O connection on the R88D-KNA5L-ECT for simulating the Home Proximity Signal? .. or is that better done using the GX-MD1611 I/O's ? Thanks millions! Regards, Michael
-
innoaloe - Good to hear from you ... I'm glad you are checking the posts on this forum .. no idea how to send personal messages here.. as you can do on PLCs.net... The whole point of this exercise is to wiggle the R5 motor like it was a linear motor .. never need to move more than 180 degrees plus or minus from zero.. just to demonstrate the NJ's ability to sum 10 sine waves of selected amplitude and frequency while slowly drifting the relative phases .. just a test of a structured text program, similar to what you proposed in my "Big Tricky Omron NJ Question" post. The trick is to get the motor to go to "home" ... and... to answer your question... Nope ... not yet ....
But, that's the fun isn't it?
-
Bit N Bytes ..Thanks for the reply .. I was worried it was just me .. well... It still could be just me. Most normal people take the Omron classes .. But, I thought "how hard could it be!..
Well... it shouldn't be this hard.. I've managed to learn Siemens S7 1200 series systems, Red Lion G3 HMI's, Delta Motion Motion controllers and many of the LinMot linear motors and servos. I could be mistaken ('cause I'm a nube) but Omron seems way too complicated .. and has way too many manuals... you read one of their manuals.. and every other sentence is a reference to another manual! .. how are you supposed to stay on track .. if you are constantly bouncing from one manual to another... sorry... more ranting.
-
hI.. I've asked for this in the past and, so far, haven't been very lucky. Most of the projects I run into have 4 or 5 axis, lots of analog and sensor input.. or don't have the HMI part of the "Machine"
I have a nice NJ 101-1000 with the NA 7 inch HMI.. along with a R88BD-KNA5L-ECT servo and a 50W G5 motor.. type R88M-K05030H-S2. All On a nice rack with power supplies and some EtherCAT I/O (It all functions .. even "MC Test Run" gets the motor to jog ..
But.. no way to "home" it....
The motor is in "rotary mode" but... it's NOT got an Absolute encoder.. it's a incremental... sniff! I just want it to stop on zero ..Or anywhere, and call it zero ... and make moves plus an' minus in degrees, that's all.... I assume I have to send it some signal (push button) while it's spinning that tells it it's in "Proximity" to home and it then it does something which makes it end up on zero. I've homed a lot of linear motors (LinMot) an' they are very easy to work with. But, Omron has 10 different homing modes .. and they aren't very well explained. Well, they aren't explained at all in that 502 page user manual... you have to already know how to do it, in order to understand the explanation... Example: Take the "Home Proximity Input Signal" .. I can imagine what it might do, to help control a move to home. I can even imagine what's making the signal .. and that somewhere there is a place where the homing parameters are set... like the "axis setting table" .. but, it's not a Global Variable, or a Data Type .. I could imagine it gets into the system from the CN1 I/O connector? or some I/O somewhere?
But.. I grow weary of imagining how this system actually works.. Building a simple working project, from a tutorial, or even downloading a simple working project (.smc2 file) and making the minor adjustments to fit my equipment ... would make all the difference in the world. I've searched Omron's Libraries of .smc2 files. Haven't found any yet that aren't on the level of "Top Gun" (a seriously complicated project for a 1-week training class) ... Oh there are several.. related to IAG object files .. but those Library files are not "working projects" intended to serve as a Tutorial.. they are limited projects, ready to be configured with IAG Object files, and "your" programming ... So that you can write the programs you need "faster"... which is nice... but, no help here.
Somewhere out there.. is a nice simple .smc2 project file where you get to control a simple motor from the HMI ..Preferably using an NJ CPU and a NA HMI .. home the motor.. jog the motor and input a few "go-to" positions... sigh!.. Like you would do in a One or Two Day class... This kind of thing should be already be available in the Sysmac Library ... Thanks much for listening.. sorry about the rant.
-
FOUND THEM! Here FYI: https://omca.app.box.com/s/r5gwb20sonklb0cvacfi4qpkzgx88ic2
1 person likes this -
OOOOps... was using wrong IP address... nothing in the software suggested there was anything wrong .. It finds the items.. then fails to display them... DUH! Yes.. I screwed up.. but Network Configurator needs several upgrades...
That first frame above, was the result of "Uploading devices".. It then says "Lookie.. I found 3! .. which ones ya want?" .. then, "flat-line"... ha! I didn't find any.. just kidding.
Us nubies have a hard time with non-intuitive software ... sad.
1 person likes this
Sine Wave Motion .. problem with "FOR" statement
in NJ Series / Sysmac Studio
Posted
OK... The FOR loop runs .. (had to see that work...) But It really can't do this job .. at least not the way I have it:
When I look at this .. It doesn't look to me like this will make a sine wave .. If it did, it would be faster than the servo could follow... Ya gotta have time in there somewhere. The CPU is going to cycle every 1ms ... 360 ms later, the FOR loop would have completed... This is not the way to make sine waves... unless you're working with radio frequencies or are Tesla.
I'm starting to think the FOR loop is not even necessary for this... I'm going back to square one.. an' just do it with the main equation, using cycle time .. standby..")