

lamboom
MrPLC Member-
Content count
185 -
Joined
-
Last visited
Posts posted by lamboom
-
-
Hi
Here's a question I'm about to ask Omron.. as soon as I can figure out who to ask.. It's complicated asking support.. their web email form doesn't make complex questions easy.
Here's the question: Can the NJ CPU program a LinMot linear motor to make the "Random Sea"?
The NJ has a mixed protocol.. Ethernet/IP and EtherCAT (CoE), and claims to be a "Motion Controller". I doubt Motion Control is available on it's Ethernet/IP line.. but the EtherCAT might be another story. Certainly The Omron NJ is a Motion Controller for Omron NJ series drives.. However, how well does it work with LinMot?
Here's the curve. Imagine a LinMot Linear motor continuously moving, never really stopping, following a real-time, mathematically generated curve, moving positive then negative, at random frequencies and random amplitudes. Almost never repeating a motion sequence. looks something like this: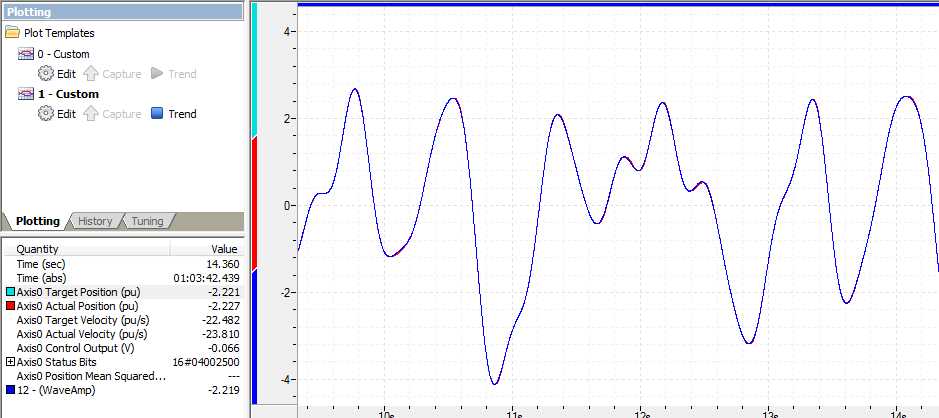
Yet, after a while the motion history fully represents the spectral distribution of energy on the surface of the ocean. Spectrum analyzers can display it, and mathematics can define it..
I just have to make that sea in a model scale…
") (Time scales by the square root of the scale factor)
(Time scales by the square root of the scale factor)
And keep the water in the tank:
https://www.youtube.com/watch?v=SQd6YzBWVvI
The big question is: Can the Omron NJ get a LinMot Linear Motor to do this? … LinMot thinks YES.. but, isn’t sure.
Yes there are ways to “connect" LinMot to The NJ.. EtherCAT (CoE), Ethernert/IP but… there is nothing in the LinMot drive that can create or store a predesigned Random Sea .. Only a Motion Controller, generating real time motion commands, by running mathematical equations, "on the fly” can do that. If the NJ is a true “Motion Controller”, and the LinMot C1250-DS-XC is implemented as an “axis” by Symac Studio, which it is… Then, there may be hope.
Closed loop, PID feedback remains with the LinMot drive, with special settings in LinMot Talk … Homing might have to be done with the NJ .. or by Digital I/O’s
What do the Omron experts out there think? Can this be done?
Thanks much, Regards, Michael -
Reminds me of Siemens... S7 1200 ..
And, I'm going to Omron to get away from Siemens.
-
Thanks for the info.. Axiomatics (I believe) only vary the pulse width as a function of analog input .. I'm not sure how to connect that to the RCP2 actuator.. unless I'm mistaken, the Pulse motor varys its speed based on the number of pulses per time, rather than the pulse width. The Omega looks interesting.. I'll check those out. -
Back in the days before digital computers, hydraulic rams with position feedback, were often controlled by servo amplifiers receiving an analog signal. The amplifier then controlled a servo valve, which ported high pressure oil to one side of the ram or the other, proportionally, in order to make the ram follow the analog signal precisely. Today we have very powerful electric actuators, controlled by computers. What I would like to do is control a not so powerful actuator, (originally intended for positioning, using a pulse motor and a simple controller for trapezoidal motion histories to get from A to B and so on..) like the IAI RCP2 Robo Cylinders .. to move just like that hydraulic ram. With a controller that accepts an an analog input just like that servo amplifier. IAI makes nothing like that. The RCP2 can be controlled by pulse chains ... and there are PLCs out there that produce pulse chains. But, is there anything out there that can accept an analog signal from a wave generator .. and produce the pulse chains that would drive the RCP2? note: I have another topic running similar to this one ... analog input to the motor controller was suggested... so, I launched this thread, to see if it's possible. -
Hi again.. do you know of a PLC.. or controller that could communicate with the RCP2 actuator by IAI... and... here's the hard part.. accept an analog signal? I don't think IAI has anything that can input an analog signal. -
Thanks for the info on Eaton/Cutler Hammer ... I'll look into it .. An' you are quite correct the "s-curve" modifications aren't gonna do it. I wonder if there's a controller out there that takes an analog signal .. converts it to a pulse train .. then drives a stepper motor in an actuator .. A lot like todays hydraulic actuators with position feedback .. the servo amplifier gets an analog waveform, then drives a servo valve... and the actuator does what the waveform looks like (as best it can... -
Thanks.. I've contacted Delta -
Thanks for the info .. interestingly, the application is for a wave generator ... ocean waves, in a small tank ... & yes, the RCP2 actuator has a pulse motor .. however the driver is not an analog input type... that would be too easy. It looks like I have to use something like the Mitsubishi FX2N-10GM? That has a programmable pulse train output. AIA suggested using a PCON-PO driver for the actuator. We are still looking into a solution. Certainly there are solutions to produce sine wave motions (you couldn't draw a circle without that ability. But, I'm not using that type of equipment .. I'm probably coming at this way wrong.. but, that's OK ... it's part of the learning curve. I want to see if I can do it without using integrated path equipment. The IAI actuator and it's controller (not the PCON) was designed to move from A to B in a trapezoid motion. I care not about "positioning" .. just the movement ..a sine wave. I love that wave generator you used! -
Hi I'm wondering if anyone has been successful using stepper motor actuators, designed for simple positioning (like IAI RCP2 actuators), to move in a simple sine wave motion .. back and forth .. and, be able to select various strokes and frequencies.
Big Tricky Omron NJ Question - RESOLVED
in NJ Series / Sysmac Studio
Posted · Edited by lamboom
Hello Innoaloe
Thanks for the reply, and your interest in the "why" of this project. The "Random Sea" is only a small part of the requirements for a model ocean simulator. usually, these tanks of water are quite large.. holding millions of gallons. However, in museums, and educational environments where marine science is explored, smaller wave tanks, or "wave flumes" are used to study physical oceanography, motion dynamics of floating structures, and coastal/ocean interactions.. such as tsunamis.
The waves are often generated by a moving structure, such as a hinged flap, or bouncing wedge, or moving wall. Most of the time a simple sine wave is all that is needed to produce waves of precise amplitude, and frequency. When a model of a floating structure is placed in this environment, and if it has been made following modeling laws of mass distribution, and dimension .. the model will behave precisely the way it would in the real world. These wave flumes are common in universities for study, and are found in some museums to display floating structure stability, and instability.. and even make model tsunamis.
As for the NJ's ability to create this "random curve" ... it might not be impossible.. At smaller scales, and for demonstration purpose, the "randomness" may not be required .. However.. One would expect to see a "Rogue Wave" now and then .. created exactly the same way nature does it .. the brief, simultaneous combining of several waves, at one moment in space and time.
I am new to Omron Sysmac Studio .. I believe there are function block like features, within the ladder logic, which can be mathematical expressions that you write, and if the NJ is a true "Motion Controller", it should be able to provide position voltage, as a function of that mathematical equation, on the fly, recalculated each cycle time. .. or Not")
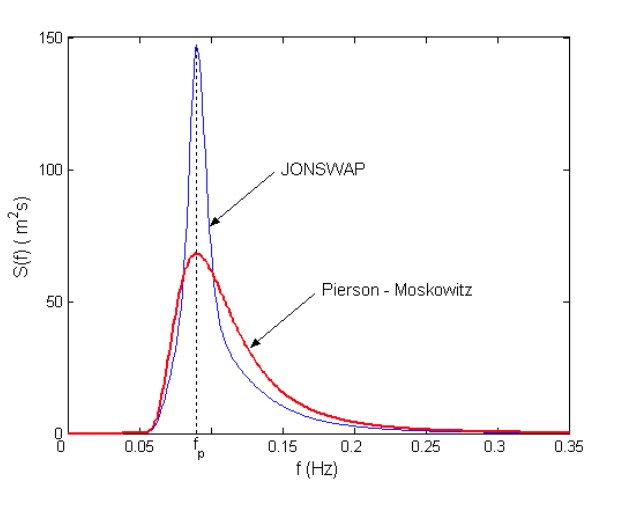
The NJ may not have a "random number" generator available to modify an equation .. and that would result in a some "sequence repeats" ... which would be kinda OK, as long as there were many sinusoidal components ... so many, that repeats would not be noticeable. The result would be a spectra of many spikes, rather than a smooth curve like the red one above.
It's interesting that one could link the NJ to Matlab. I wouldn't know how to do that, and it might not be necessary. The "equation" for the "look" of the random sea is simply a summation of sine waves. A good random sea for model studies requires a little more sophistication. However, I'm thinking the NJ ought to be able to solve a 10 wave series of sines, phase locked and create position control from that sum in real time... for a LinMot EtherCAT drive, within the cycle time of the CPU.