

Bapt
MrPLC Member-
Content count
3 -
Joined
-
Last visited
Posts posted by Bapt
-
-
Hi, thank you for your reply.
The robot is an Omron delta CR-UGD4MINI-NR with 3 motors and the CPU is a NJ501-4300 all the setup was already made in another sysmac studio project
Like I said I already managed to move the robot with linear moves in a xy plane by giving absolute coordinates.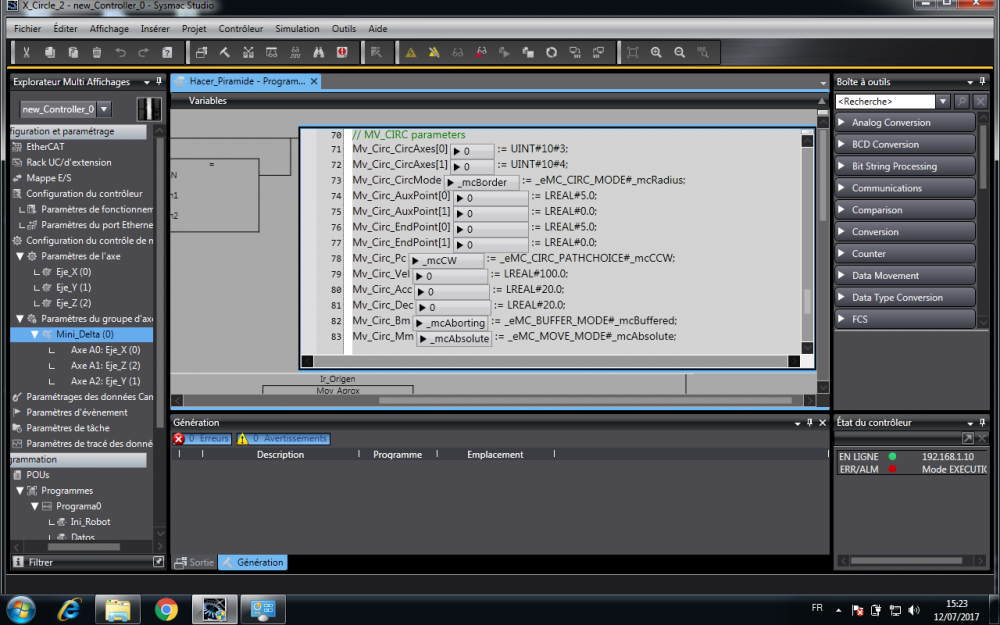

-
Hi everyone.
I'm a French student doing a traineeship in Spain and I have to program a parallel robot from Omron using Sysmac studio.
By now I've succeeded to make a program using linear movements and it works fine, I can make whatever I want with linear movements.
But, for the application I want to make I have to succeed in making the robot a circular movement.
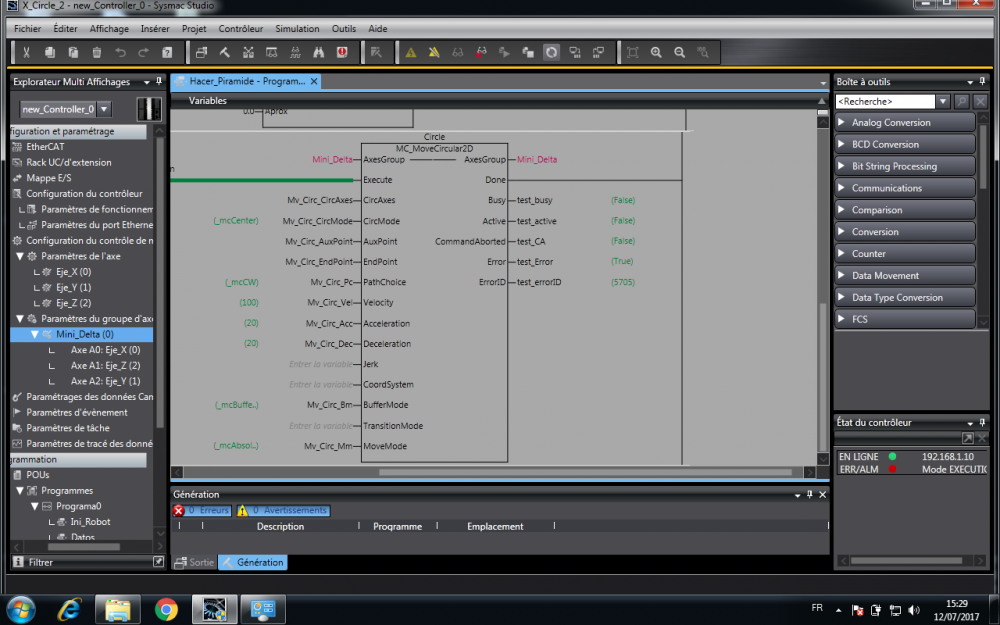
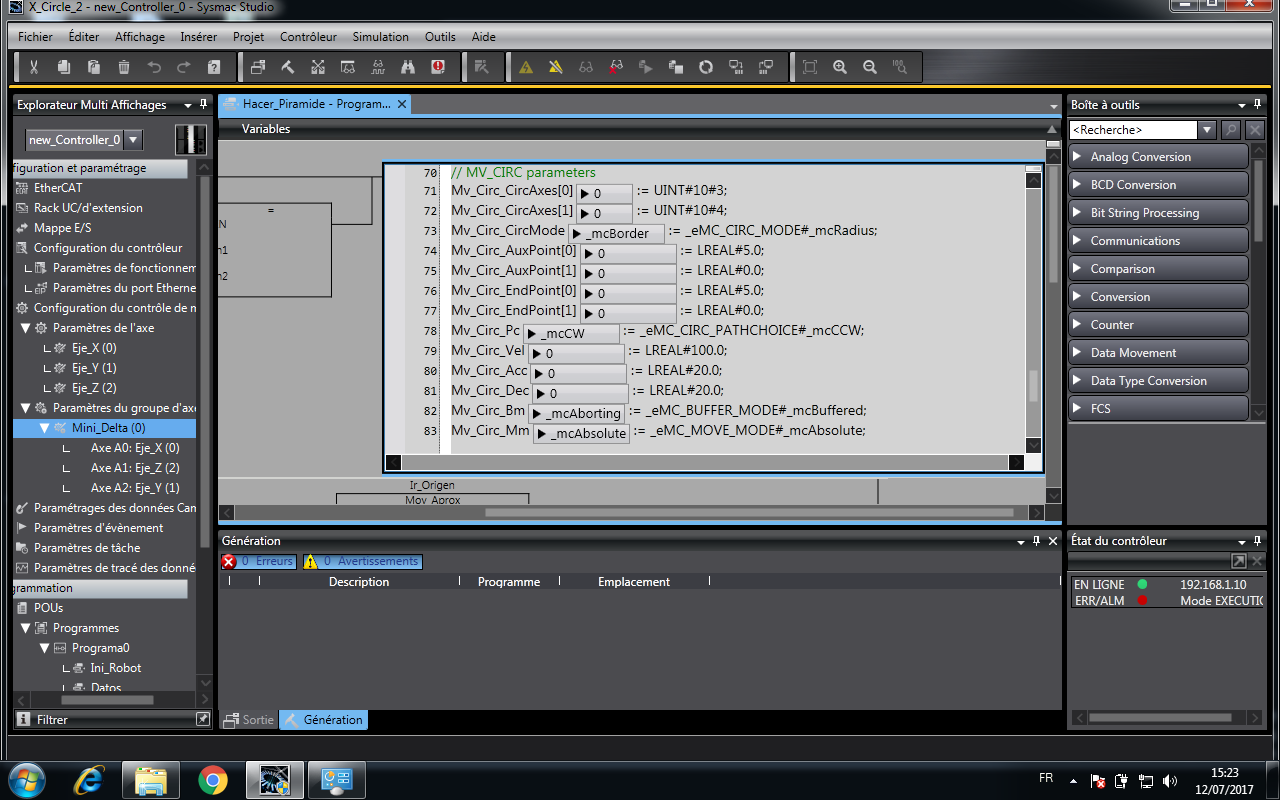
for that I have tried to use the MC_Movecircular2D block.The problem is that trying every method of interpolation (radius, center and border) This block's returning me an Error ID that I can't identify in the help of the program and the docs I found by googling it.
This error is the error 5705.
Don't hesitate in asking me more precise informations (captures, configurations, etc..)Thanks.

Sysmac Studio Unknown error
in NJ Series / Sysmac Studio
Posted
Thank you for yours answers.
Yes I think I have to use these Robot commands but I can't figure out how to make circular trajectories with those blocks.
Does anyone have an idea ?
Thank you.