Search the Community
Showing results for tags 'motion; servo; kinetix'.
Found 166 results
-
I new to the Cx-programmer. I'm facing a problem where i need make the servo motor go to certain direction and stop at the direction until other signal is sensed. Is there any instruction which can be used to do the ladder diagram? is it using PWM instruction? Is my servo motor (sg90) suitable for PLC ? do i need motor driver for this servo motor? or i just have to connect to the PLC 5v ? Im using CJ1M CPU21 PLC module. Im doing a sorting system project that use the servo motor to slide the item to certain angle.
-
Hello everyone, Is there any way to communicate with Mitsubishi Servo amplifier MR-J2S-350CP through RS232 ,I prefer to use 224XP because i already have it... thank you
-

5500 Kinetex Servo Drive with L33ERM Home Entry
dipen_95 posted a topic in Allen Bradley / Rockwell Automation
I know it may sound stupid but I am new with Studio 5000 and trying to build a project where I have to home my servo drive other than the position to zero and it is not fix but rather decided by a safety switch. What I am looking for is a dynamic Home position Entry which I am able to find it in the axis parameter but not in the CIP_Structure. Is any kind of motion FB for home position set entry? Any help would be useful. Thanks PS: Studio 5000 v30, Kinetex 5500 v7.01, L33ERM processor -
Hi i am new to Mitsubishi servo drives, i want to know how to Tune the Mitsubishi (MR-JE-A-200w) servo drive Can any one guide me please
-
Looking for some servo application help. Software: I have GX works 2, GT Designer, and GX Developer. Hardware: PLC L06CPU-P, GOT2000 HMI, MR-J4-350B servo amps, HG-JR35JK motors, LD77MS2 Pulser I have (2) AC servos that will simply move an aluminum frame backwards and forwards using a FESTO belt mover and I have a servo gear reducer 20:1. I have a "simple motion module"and all of this hardware and software, plenty of time, and would really like to finish this project off. But this is my first servo and my first hmi project. I have some experience with Omron, Mitsubishi, and Allen-Bradley plc's, and consider myself novice at best. Any sample programs or help getting me started would be greatly appreciated!
-
Hi Here's a question I'm about to ask Omron.. as soon as I can figure out who to ask.. It's complicated asking support.. their web email form doesn't make complex questions easy. Here's the question: Can the NJ CPU program a LinMot linear motor to make the "Random Sea"? The NJ has a mixed protocol.. Ethernet/IP and EtherCAT (CoE), and claims to be a "Motion Controller". I doubt Motion Control is available on it's Ethernet/IP line.. but the EtherCAT might be another story. Certainly The Omron NJ is a Motion Controller for Omron NJ series drives.. However, how well does it work with LinMot? Here's the curve. Imagine a LinMot Linear motor continuously moving, never really stopping, following a real-time, mathematically generated curve, moving positive then negative, at random frequencies and random amplitudes. Almost never repeating a motion sequence. looks something like this: Yet, after a while the motion history fully represents the spectral distribution of energy on the surface of the ocean. Spectrum analyzers can display it, and mathematics can define it.. I just have to make that sea in a model scale… (Time scales by the square root of the scale factor) And keep the water in the tank: https://www.youtube.com/watch?v=SQd6YzBWVvI The big question is: Can the Omron NJ get a LinMot Linear Motor to do this? … LinMot thinks YES.. but, isn’t sure. Yes there are ways to “connect" LinMot to The NJ.. EtherCAT (CoE), Ethernert/IP but… there is nothing in the LinMot drive that can create or store a predesigned Random Sea .. Only a Motion Controller, generating real time motion commands, by running mathematical equations, "on the fly” can do that. If the NJ is a true “Motion Controller”, and the LinMot C1250-DS-XC is implemented as an “axis” by Symac Studio, which it is… Then, there may be hope. Closed loop, PID feedback remains with the LinMot drive, with special settings in LinMot Talk … Homing might have to be done with the NJ .. or by Digital I/O’s What do the Omron experts out there think? Can this be done? Thanks much, Regards, Michael
-
I want to run MR J3 A type 10 nos servo without using network, I'm to run servo using hardwired.please name motion controller to run 10 servo on hardwired..
-
I am searching for the Replacement of the Ultra 5000 Servo Drive as i cant get online to it with the Ultraware software over wireless plant network. In order to get online i have to connect serial cable every time. And the Drives are used in time critical assembly line kind of environment. So is there any other replacement which works as intelligent as of Ultra 5000 and also have additional feature of built in Ethernet port which can help me to get online with it wireless over plant network.
-
Hi, I have begun to look into some positioning equipment we have had for a while. There is a CQM1 CPU51 connected to R88D-U series servo drives, and a CS1 with C200HW-NC113 and a R88D-U. I have found WinMon on myomron, but not tried to install it yet, will it run at all on a Win7 machine or do I have to dig out some older PC? Same with the NC unit, there is mentioned a SYSMAC-NCT program in the manual, but I have not been able to find this anywhere, Is this still a commercial item? Are there any newer software that will communicate with these old units? If we decide to upgrade any of this, will we have to replace all, or is it possible to reuse the servomotors or other parts? This is all for educational purposes, no production or safety issues involved. I would of course like my students to work with the most updated systems, but unfortunately we are on a limited budget :( Geir
-

A simple tutorial .smc2 project program for motion control (1) G5 servo
lamboom posted a topic in NJ Series / Sysmac Studio
hI.. I've asked for this in the past and, so far, haven't been very lucky. Most of the projects I run into have 4 or 5 axis, lots of analog and sensor input.. or don't have the HMI part of the "Machine" I have a nice NJ 101-1000 with the NA 7 inch HMI.. along with a R88BD-KNA5L-ECT servo and a 50W G5 motor.. type R88M-K05030H-S2. All On a nice rack with power supplies and some EtherCAT I/O (It all functions .. even "MC Test Run" gets the motor to jog .. But.. no way to "home" it.... The motor is in "rotary mode" but... it's NOT got an Absolute encoder.. it's a incremental... sniff! I just want it to stop on zero ..Or anywhere, and call it zero ... and make moves plus an' minus in degrees, that's all.... I assume I have to send it some signal (push button) while it's spinning that tells it it's in "Proximity" to home and it then it does something which makes it end up on zero. I've homed a lot of linear motors (LinMot) an' they are very easy to work with. But, Omron has 10 different homing modes .. and they aren't very well explained. Well, they aren't explained at all in that 502 page user manual... you have to already know how to do it, in order to understand the explanation... Example: Take the "Home Proximity Input Signal" .. I can imagine what it might do, to help control a move to home. I can even imagine what's making the signal .. and that somewhere there is a place where the homing parameters are set... like the "axis setting table" .. but, it's not a Global Variable, or a Data Type .. I could imagine it gets into the system from the CN1 I/O connector? or some I/O somewhere? But.. I grow weary of imagining how this system actually works.. Building a simple working project, from a tutorial, or even downloading a simple working project (.smc2 file) and making the minor adjustments to fit my equipment ... would make all the difference in the world. I've searched Omron's Libraries of .smc2 files. Haven't found any yet that aren't on the level of "Top Gun" (a seriously complicated project for a 1-week training class) ... Oh there are several.. related to IAG object files .. but those Library files are not "working projects" intended to serve as a Tutorial.. they are limited projects, ready to be configured with IAG Object files, and "your" programming ... So that you can write the programs you need "faster"... which is nice... but, no help here. Somewhere out there.. is a nice simple .smc2 project file where you get to control a simple motor from the HMI ..Preferably using an NJ CPU and a NA HMI .. home the motor.. jog the motor and input a few "go-to" positions... sigh!.. Like you would do in a One or Two Day class... This kind of thing should be already be available in the Sysmac Library ... Thanks much for listening.. sorry about the rant. -
Version 1.0.0
560 downloads
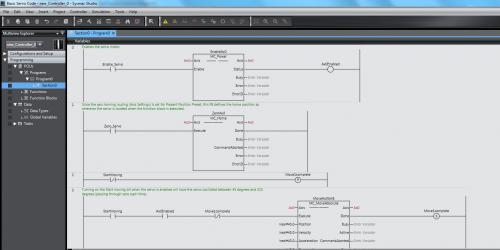
This is a very simple ladder program that shows the basic steps to enable, zero and move a 1S servo using the NJ controller. -

[PLC Sample Code] - Basic Servo Control Code for NJ and 1S
Michael Walsh posted a topic in Download Comments
View File Basic Servo Control Code for NJ and 1S This is a very simple ladder program that shows the basic steps to enable, zero and move a 1S servo using the NJ controller. Submitter Michael Walsh Submitted 02/10/17 Category PLC Sample Code -
hi all master mind I m irfan from Pakistan I want to drive servo motor with plc Mitsubishi fx3g.friends how create the A.pulse and B.pulse in the programming ladder for servo Drive. respected masters solve it problem with thanks
-
I am trying to learn the logic of a process at my new job. There are tag names that I can't make sense of because they end with _xva, _xvb, _xvu, _xvd, _xvo, _xvc, _zsm, _zsu, _zsc, _zso, _zsd and so on and so forth. I know they are associated with motion, but I need to make better sense of them. There are no descriptors. What do they mean and is there a resource available that I can reference?
-
HELP ERROR S55 KINETIX 6500 s55 velocity error or excess positon error
Joshua Alf posted a topic in Allen Bradley / Rockwell Automation
HI , I would like to ask you for your opinion THIS IS MY PROBLEM WITH THE kinetix 6500 The equipment was working fine , but now i cant make to servo move with the program, cant run the test or autotuning Status in front of servo drives say running. Everything is green, no errors, when I activate the MSO I can hear a click at servodrive, but the servo is not energized, because i dont hear the usual noise when the servo is energized, I have check the cables and conectors, everythig is fines, I check the servo resistence , no shortcuts or open lines, The wierd part is when the servos are in the running state i can move by hand, they are supossed to be locked. after that I activate the home MAH, or test or autotuning , or a direct command ,and then it fails When i try to jog . move, test or autotuning the servo it says s55 velocity error or excess positon error, i can not get servo to move at all I can see the position from the encoder back to the plc. I have turned the servo and i see the position at actualposition Before the equipment was working , moving , I just swith it off one day, and the next day I couldnt make it move Best regards I have added the programm as an attachment k6500.ACD -
Can someone explain how an FFT works in regards to servo motor tuning?
Ballen22 posted a topic in General Topics - The Lounge
Hello All, I'm in the process of tuning a motor and I understand almost everything that is happening. The only thing that doesn't really make sense is how frequency relates to the speed of the motor. For instance, let's say my 3db point is at 100 Hz. I understand that from 0 to 100 Hz my motor is stable. If I have a 3000 RPM motor, how does 0 to 100 Hz relate to the maximum speed I can run the motor and still have precise positioning. Thank you -
i need a example code for position control of MR-J3-20A with QD75D4 as intelligence module. and i want to see the parameter if possible
-
Just wondering if I need to set up two Motion Groups to specify the direction of travel along 1 AXIS? (Forward and Reverse) If not, how do I specify direction when using motion instructions (specifically MAM) with incremental motion.
-
Hello, I'm new to this forum and PLC world in general (especially to Mistubishi PLCs). I have a task in which I need to synchronize servomotor with another motor that runs conveyer (servomotor needs to stamp a label on a foil on a conveyer), in GX Works3. Servo motor is run by Simple Motion module. I need general tips on how to make pulses from encoder into something useful that can be used to send data to Simple Motion module. I need high speed counter to count pulses (never actually did this, I got this from manuals), how would I, for example, get speed out of it? Number n pulses, divide it with time it took to get to n pulses? How would I make Simple Motion to make servomotor on his Axis #1 to rotate at same speed?
-
does anyone can help how to connect plc fx2n-16mt with servo drive mr-j2s-40 and motor servo hc-kfs-43 ? please give me wiring schematic thanks a lot
-
Hi guys, been using this site for a long time, it has come in handy alot. However I have recently taken on my first servo project, heres an overview of the project We have a filling machine that has a separate dosing system to the filler head. It used to keep the dosing in time by adjusting a 0-10v signal to an inverter to make sure that a flag makes a sensor in a set window. I have installed an encoder on the filling head and an mpl servo to the dosing. I have then used an MAPC instruction to follow the encoder, the cam is 0-360 and it follows a straight linear line. I have installed of this as a temporary set up on one of the filling machines (we have 2) and it is working perfectly. I have now installed this on the second machine as a permanent set up with a panelview plus 7, L71 cpu. However it is giving a very strange problem on first power up, the encoder is giving the exact same position as before it was powered down. however as soon as the MAPC executes the servo axis faults, giving an overspeed fault. the servo doesnt even look like its attempting to move (however it is through a 10-1 gearbox). if i then home the encoder it then runs absolutely perfectly until it is powered down again. I am beginning to think it may be to do with the master lock and cam lock position, as the cycle stop position of the two machines are different. however I just cant seem to get my head around i the difference between them. Hopefully that makes sense any help would be greatly appreciated Thanks Rhys c1_dosing.ACD
-
Hello All, I'm completely new to the motion control systems and I'm interested in learning servo programming and motion control. I was trying to find a good resource that I can start learning from A-Z, but I couldn't find any. I have a demo kit with compactlogix processor and two kinetix 6500 drives with servo motors. What is the best way to learn it. If you guys have any resources or basic sample program please help me. Any learning material would be helpful. Thank You All
-
I have a Mitsubishi servo Pak #MR-J3-40B with an error 25 and 95 flashing. Could not find any help on the web or in the manual. Any help appreciated.
-
hi, im student im trying to make a position control with the misubishi serie of servos, i have 2 mr-j2s-20a and 1 fx2n-20gm i was reading the manual i didnt readed all yet, i wat to know if i can control the position with a fx2n plc and if someone can send me a example of a code using it. thx for your attention
-
C200HW-MC402.pdf View File C200HW-MC402-E Motion Control Unit Operation Manual Produced June 2001 Submitter IO_Rack Submitted 03/09/16 Category Manuals