Search the Community
Showing results for tags 'compactlogix encoder'.
Found 128 results
-
Hi, I need to use an absolute encoder to measure angle of turning object. I have to use S7-400 and a PVM14 absolute encoder. The Encoder support "PROFIBUS interface" and use "Class 1 and 2 in accordance with PNO profile 3.062". I am looking for example code, or a good manual. Any advice appreciated!
-
Hello, The company that I work for wanted me to design and build a FIFO loader. For those who do not know what a FIFO loader is, it's basically a lift that runs up and down and filling up the magazine slots with pcb's. After I finish the mechanical part i'll try to program it by using a CPM2C - 20. I have already played with CX-programmer and learned my self a bit, for example how to program simple things such as AND and OR gates for controlling motors and lights. Really hard part for me was figuring out how to create a program that reads data from the encoder and use it to create positions which the motor will stop at, and i have not yet figured it out. I've been trying to google it without any luck, the only thing of real info i've got is a 650 page long pdf file or CX-Programmer manual which is hard for me to read since i'm new to all of this. Would be great if any of you people got any source or maybe a manual which are easy to understand for new beginner like myself. A bit about the program i would like to make: The FIFO loader will have some buttons for selecting different programs, lets say you press first button to select "program 1". Then the machine should move up and stop at posision "50" (there are 50 slots on PCB magazine) after it gets signal from pneumatic actuator (which will be used to shove pcb inside the slot) its should move to position "49" and so on.. If FIFO loader is located at "home" position and you press second button to choose "program 2", then it will move to slot "49", wait until it gets loaded, and continue to slot "47" and so on.. The meaning of this is to make a loader which can select a program to fit pcb's with different size of components.
-
How do I add a constant string to a CompactLogix PLC and RSLogix5000? How do I copy one string to another? I have found links to using the COP instruction, which is fair enough, but the source parameter needs a tag and not a literal. How do I get a value into the tag? Can I really only do it when online? I'm new to Allen Bradley, and finding string usage to be very confusing so far.
-
PAROCK1 for HMI/SCADA View File Now a software solution is available for your Modbus (MB) needs in Rockwell/Allen-Bradley Control Logix or Compact Logix (Clgx) family processors, instead of a traditional 3rd party hardware like Prosoft MVI-56, Molex SST-SR4-CLX-RLL etc. It is an Add-on instruction (AOI) for PLC/PAC firmware v16 or later, (other solutions are available for pre v16 systems). For hardware interface, use PLC’s channel 0 (serial) or TCP/IP Interface module(s) to have as many MB TCP/IP devices or serial devices. (Some limits apply based on system configurations, Comm. settings depending on HW used.) Connect any MB Client/Master or Server/Slave device(s) to your CLgx PLC, including flow computers, analyzers, VFDs, Power Monitors, Level gauges, Smart I/O, etc. All the MB public/native function codes are supported. 32-Bit integers/floats as single entity are supported with byte and word level swapping. A separate utility automates the data mapping to your PLC logic. Features -Serial Master (BASIC required Option); TCP; Slave; Redundancy; More than 5000 accumulative registers; MB CFC (Custom/Private Function Code) Support; Data mapping too – Between PAROCK1 & your PLC logic; Packaged with Rockwell; TCP/IP Interface Module; Volume Discounts; Annual Support Requirements -Rockwell/AB-CLgx processor with v16 or later. Contact PCI for earlier versions. -If using CPU’s Chan0, you cannot use Chan0 for any other user mode activity. You can use it for non-user mode activities -TCP/IP Interface Modules from Rockwell/AB supported, are: -1756-EN2xx ControlLogix® Ethernet/IP communication modules, firmware revision 5.007 or later -1756-EWEB ControlLogix Ethernet/IP web server module, firmware revision 4.006 or later -1768-EWEB CompactLogix Ethernet/IP web server module, firmware revision 1.002 or later -1769-L30ER, 1769-L30ERM, 1769-L30ER-NSE, 1769-L33ER, 1769-L33ERM, and 1769-L36ERM CompactLogix controllers, firmware revision 20.011 or later -1769-L24ER-QB1B, 1769-L24ER-QBFC1B, 1769-L27ERM-QBFC1B CompactLogix controllers, firmware revision 20.011 or later -1769-L16ER, 1769-L18ER, 1769-L18ERM CompactLogix controllers, firmware revision 20.011 or later Other Related Services/Items -Custom PLC Add-on instructions building -PLC upgrades, troubleshooting, applications -PC Windows, iOS5, Linux, Mobile devices Comm. Drivers -Custom development, Technology Transfer Services -Other Non-AB communication drivers for serial or TCP -Full control system integration, training, architecture design This driver can be conviniently used with Visual Studio in development of complete large scale complex HMI/SCADA Systems. It can be used to perform advanced reporting MES, analytics, IoT, Big data type apps. One example is available to download here For More Info Overview of Parijat Drivers: Click here Additional supporting Info about Parijat Drivers:Click here Complete Related Driver options: Click here Submitter Scadadoctor Submitted 03/10/16 Category Other PLC Demo Software
-
Version 3.11.2.0
518 downloads
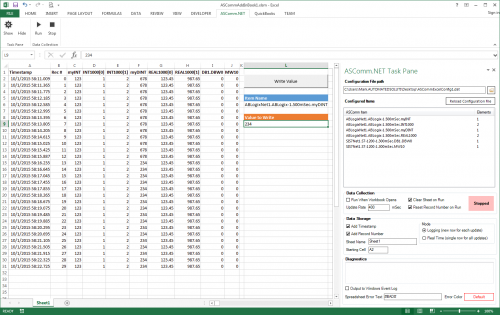
ASComm Excel Add-in is a simple to use, non-programmatic way to populate Excel 2007 - 2021 (version 16) spreadsheets with data from PLCs, instrumentation, and other process hardware. ASComm Excel Add-in uses built-in drivers for Allen-Bradley ControlLogix, CompactLogix, MicroLogix, Micro800, PLC5, and SLC500 communications. No OPC, DDE, external drivers, or programming required. -

[Demo Software] - Excel Add-in for Allen-Bradley Data Logging
Automated Solutions posted a topic in Download Comments
View File Excel Add-in for Allen-Bradley Data Logging ASComm Excel Add-in is a simple to use, non-programmatic way to populate Excel 2007 - 2016 spreadsheets with data from PLCs, instrumentation, and other process hardware. ASComm Excel Add-in uses built-in drivers for Allen-Bradley ControlLogix, CompactLogix, MicroLogix, Micro800, PLC5, and SLC500 communications. No OPC, DDE, external drivers, or programming required. Submitter Automated Solutions Submitted 03/01/16 Category Demo Software -

Multiple PLCs CIP Messaging Single CLX Main PLC
Stockman posted a topic in Allen Bradley / Rockwell Automation
I have a project that has moving carriers that each have their own CompactLogix processor onboard communicating over wireless to the main Controllogix PLC. When each station needs to update the supervisor or vice versa we enable a CIP Data Table Write to the other PLC. We have 36 moving stations basically, and one main. Looking for any tips from anyone who has had a similar project. We have lost messages in our trial and may need to sequence the messages. Thanks in advance. -
Hello, I hope you are all having a great Wednesday. So I was wondering if this is possible, and if so, how to do it. What I'm trying to do is get a real time speed of my hydraulic cylinder using a transducer, a 1769-HSC high speed counter module, and a 1769-L36ERM processor. Kind of like a speedometer in my car. I would like the number in inches/ second. We use a hydraulic proportional valve to control a cylinder that we use to pump molten lead into our die cast machines. Back in the day they used to use limit switched that rest on a tail rod attached to the cylinder shaft to get an approximate stroke length. It was very crude, but it worked for what it was. I'll explain a little more, in case I'm not explaining it very clearly. So on most of our machines the maximum stroke length of a normal shot is about 11". We have different "stages" to the shot. Stage one is typically from 0" (when the shot is all the way returned) until about 1.5", at 1.5" the valve stops and there is a shot delay for 1 second (vacuum draws some lead into the goose neck and into the beginning of the mold), after the delay second stage starts, second stage is from 1.5" to 4", third stage is from 4" to 8" and fourth stage is from 8" to 11.5" or until the shot timer finishes timing, and then another valve switches, and the shot starts it's return. We have the different stages because we typically shoot the cylinder slower at first, and then delay and then almost maximum velocity. We control the velocity with an analog output to a solenoid on a hydraulic valve. For example, for the first stage we may open it up 20%, then 0% during the delay and then 85% during second, third and fourth. Sometimes we play around with different shot delay times, different shot velocities, sometimes 3rd may be faster than 4th, ect, to get the best die casted parts. Anyways, so in the past they would use limit switches. One was a button head style that when the shot cylinder shaft was all the way returned, it made the switch, and we knew the shot was fully returned. One was set at 1.5", 4", 8" etc. They all, except for the shot return switch, were roller style limit switches. They were all made, and once the shot reached that stroke length, they would come off the rod and we would know we were in that next stage. So it was very crude. If you wanted to adjust the stages you would have to climb up on top of the very hot molten lead pot, mark where the limit switch currently was (in case you needed to put it back) loosen the bracket, try to make a measurement and guess how far you moved it. It was crude to say the least. Some of our older style machines that don't need much tweaking still use the limit switch style positioning system. Most of our new machines all use a VisiTrak transducer. The shot cylinder rod that is attached to the cylinder shaft is actually threaded and then has a very thing layer of chrome plating. The transducer sits against the shaft and counts the threads. It transfers those counts to a Very High Speed Counter module in our PLC I/O rack. We have a CompactLogix L36ERM processor and we use a 1769-HSC as the VHS Counter. Then we just do some math in the PLC program and we are able to get shot stroke in inches. We set different compare instructions, for example when: Shot_Stroke is greater than or equal to 0 AND Shot_Stroke is less than or equal to 1.5 then 1st_Stage_Bit is active. We set up different numbers for all the different stages and still use the button head limit switch as a second method to confirm that the stroke is fully returned. The counter is very fast. We are able to know what the shaft stroke is at any given point. We currently do some math using the distance of each stage and using timers to calculate inches per second of each stage. That way we can have a nice Speed number in inches/second that we can use to make different adjustments to the shot. Typically the first stage is about 7"/second second is: 24"/second third is: 42"/second and fourth is 2"/second. But I want a real-time, current speed, not just the speed that it traveled through each of the stages. Ok, after all of that explaining, I'm finally getting to my question. How would I logically write a set of instructions that could give me current speed in inches per second. Like i said, I am able to calculate the speed of each stage, after the shot has completed the stage, I just divide the distance of the stage (in inches) by the time it took to travel through that stage (in seconds). But I would like to have a real time speed, kind of like a speedometer on a car. Is this possible? I know that the scan time on this processor is very fast and the high speed counter module counts very fast as well. How do I do the math to get a real time speed in inches/ second? Sorry for the very long post. I just thought i would give you a background on what we are doing/ would like to do. Thank you very much.
-
Hello all, Let me start by saying that although I have been working with PLCs for 20+ years I am very (as in brand) new to the Siemens world (my wheelhouse is AB). That being said I have a Siemens S7-1500 (1511 specifically) CPU with a couple of SICK multi-turn Profi-Net encoders (AFM60A-S4NB018x12) that I need to talk to. - I am using TIA v13 with all of the updates. - I have the GSD file from SICK for the encoder. - I have no clue what I am doing - I can see the encoder values update in the watch table as I move the encoder. All fine and dandy so far... Here's where the white flag is going up.... - I am of the belief that there are existing function blocks out there 'somewhere' that can read and write to the base parameters. I have contacted our local rep who deferred me to SICK. I have emailed and left messages with them and have not gotten a return anything thus far. Here's our application... We are attaching each encoder to its own rotary gear mechanism. The rotary will need to turn in the CW direction approximately 400 degrees then return to its start point by rotating in the CCW direction by the same amount. If/When production/maintenance needs to 'rehome' the assembly, the expectation is that they 'pin' the drive in a known location then a bit would be set within the CPU that would assign a specific value to the encoder's actual position. In the SICK manual (8015078/YIX6/2015-01-16) on page 31 (section 3.6.3) there is reference to Preset control. This is what I believe we need to perform the aforementioned function. Does anyone have any examples that they could share on how to read/write to these encoders by use of a Function Block or other? Relatively desperate for help at this point. Can post test code if need be. Thank you in advance, TLAF
-
Connecting a Fanuc R-30iB controller to CompactLogix L30ER
hboyer90 posted a topic in Allen Bradley / Rockwell Automation
Hello, I am trying to get a Fanuc R-30iB controller added into my RSLogix program. The PLC is a CompactLogix 1769-L30ER When I search for new modules to add I see a pre setup Fanuc Robot Ethernet module, but I can't get that to work. I tried following Fanuc's instructions and setting it up as a generic ethernet module, but I couldn't get that to work either, it just says i/o not responding for that module. I am definitely able to ping the Fanuc controller, so I believe I am seeing it. When I add the controller in RSLinx, it's there, but there is no icon next to it's name. I'm guessing because its a fairly new controller, and it came out after the version of RSLinx that I'm using? Don't I need to download the EDS file for the new controller so that Linx can recognize it? Any help would be greatly appreciated. Thanks -
Can a 1769-L36ERM communicate on 2 separate Ethernet networks?
smhiestand posted a topic in Allen Bradley / Rockwell Automation
Using its internal Ethernet ports, our 1769-L36ERM processor communicates with 15 other devices inside the same machine. Can a rack mounted Ethernet module be installed to allow communication to/from this processor and an external network containing a SCADA system and RSLogix 5000 workstations? We prefer not to add all 16 devices to our external network and our I/S department does not allow routing devices on the network that they did not install. -
compactlogix firmware upgrade fail
islam141414 posted a topic in Allen Bradley / Rockwell Automation
I have new compactlogix plc L43, it was 1.4 firmware rev and when i try to upgrade the firmware the communication lost during upgrade , I make this upgrade using Serial communication (very slowwwwww) Now i cannot see the plc on RSlinix and cannot communicate with it I know that if the communication loss during firmeare upgrade, the PLC will be stop and it should return back to allen bradley any one have soloution for this problem ?????????????? -
Help with HMIs (PanelView Plus Compact 400)
Evilbeard posted a topic in Allen Bradley / Rockwell Automation
Hi. I'm taking a class through my job (I'm an industrial maintenance technician), and they've offered us the schooling through our local community college. They bring the trainers and laptops to our site, and we have class there. We're in our "PLC II" class, and we're using CompactLogix 5332E 1769-L32E PLCs with PanelView Plus Compact 400 HMIs. I'm having issues with getting my PLC to work properly with the HMI. I have a very simple program. A pushbutton turns on a timer with blinks a light. I have my tags as Green_On and Output_Green. They're obviously aliases for Local:1:Data.0 and Local.2:O.Data.0. I created a screen in FactoryTalk View ME, and gave it two simple pushbuttons. One a Maintained and one a Momentary. I created tags in the HMI, and linked them to the tags in the PLC. I have the button properties set as such: I create the runtime application and send it to the HMI. When I push the buttons on the HMI, I get no response from the PLC. If I push the manual pushbutton on the trainer, the PLC reacts appropriately and the buttons on the HMI change state (from the tag indicator). What am I doing wrong? Obviously the HMI is seeing the PLC, because the pushbuttons are updating the to tags change in state from 0 to 1. Why is it when I press the buttons, I'm not writing the value to the tags and the PLC changing state? I've talked to the instructor, but he's been retired for some time, and while he's given us a good overview of the basics, he's a bit out of his depth. -

CompactLogix using Analog Press Encoder
jrupp82 posted a topic in Allen Bradley / Rockwell Automation
I'll set the scene a little before I explain the issue that I am having. I have an application where I have a Linear Servo Slide acting as a Press Kick-off cylinder on a ceramic press. In order to trigger this Slide accurately, I have installed an Absolute Rotary Encoder (a Turck product) to the press, which outputs an Analog signal for its specific position. I then have this as an input into my CompactLogix L33ERM through a 1769-IF4 Analog Input card. Within my code, I'm trying to capture the moment where the press has presented the part out of the die and it can be ejected from the press cavity without damage the part. Mis-timing on this ejection and the part will clip the die pad tooling and incur damage upon ejection. Now, one last point of clarification, I am a Mechanical Engineer by trade, so I don't claim to be an expert programmer. But I have learned a lot and have gained experience in programming applications like this, so I can learn quick and should be able to program this task. I have had my local Allen Bradley guy look at the code I'm using for this application, and he thinks it looks good, but I'm still having issues. What I have done, is within the code, I have a window that I look for, of the encoder's position, to trigger the ejection shoe to fire its sequence and kick the part off. However, I have had to make this window so large in order for the code to see it every press cycle, that occasionally, the ejection shoe will be fired at the back end of the window, which is actually too late, and my part is being damaged. Attached is a snapshot of the code. The OkSamplePress.DN is actually a timer that I have that looks at the current press rate and puts a delay in to not allow the kick-off to fire too early, because I was actually getting a glitch before where the kick-off would fire prematurely for some reason. I don't know if anyone can offer assistance on this or not, but I would greatly appreciate any help at all. Its become quite frustrating, as the rest of my machine functions quite well, and this seems to be the nagging issue I can't get rid of. Thanks in advance...Josh -
Download mode bit in RSLogix5000 CompactLogix?
hboyer90 posted a topic in Allen Bradley / Rockwell Automation
Hey, this may be an obvious question, but here goes: I have a CompactLogix L36ERM running RL5000 controlling one of our lead die cast machines. When I make a change to the program offline and need to download I always go and shut the machine down for safety reasons before downloading. One of our techs stopped the machine but left the control power and hydraulic pump on while downloading (something we are not supposed to do) when he finished downloading he switched it back to run mode and the machine closed on it's own and started right back up. This is a safety concern to me. We have a "close enable" tag that is true when all necessary conditions are met, and gets latched on when the machine is running in full auto. Before he downloaded the machine was at idle, meaning that the only way to close the machine would be to press the two dead-man switches to start the process. But, when he downloaded it started up automatically. Now I know the reason why is when the program was last saved, the "close enable" tag had a value of 1, it was latched on, so it bypassed the dead-man switches. A quick fix would be to save the program with that tag un-latched so that it can't start up on it's own after downloading. But, in case somebody saves the program while the machine is running and with that tag latched on, I need a better solution. Is there any tag or bit that goes true when a program is downloaded or when the mode of the PLC is switched from run to download to run? I want to manipulate that tag so that when I download it un-latches the "close enable" tag. I'm sure there is a way to do it, I'm just not even really sure what to search for in the online help. Any help is greatly appreciated. Thanks Howard -
MicroLogix 1100 to CompactLogix L-45 via MSG command
PaulKim1003 posted a topic in Allen Bradley / Rockwell Automation
Hello, I am trying to communicate with MicroLogix 1100 from CompactLogix. But I keep getting an error and It says connection failure. This is what I have done so far. Can anyone tell me what I am missing? Regards, -
Hey guys, so I feel like I must be doing something wrong here, well obviously since I cant get it to work. So I have a CompactLogix L36ERM running RSLogix5000, I've got 28 cards in total, all working except for one. My 1769-OF8V Analog Ouptut module. I just want to be able to output a 0-10v signal to a proportional valve module, specifically a Parker PCD00. Anyways, so I am online with the processor, everything is looking good, I/O is responding. I have the specific channel on that output module enabled in the module properties. I have tried changing the data type to every different option, I have raised and lowered the limits. I think I am addressing it correctly. I am just trying to move a value into that channel's data file. It appears to be moving the number in just fine, but when I put a meter on the output for that channel, I get 0V from the output to analog com. There is a little switch inside the module that allows you to use rack power or external 24V, I tried switching it down and using an external 24VDC source, I currently have it switched up to use the rack power. I'm lost. If somebody could please help me out and tell me if there is something obvious that I'm missing or doing wrong/ take me through an easy step by step way of setting this up for basic 0-10v output, that would be great. Sorry for being so new, I have attached a couple screenshots of the logic I'm using and the way I have it configured right now, but I have tried all different configurations. Thanks, Howard
-
Hello, I am not sure if this topic is too far from what the forum concerns, but any advice is greatly appreciated including reference to other reference. I want to know if any induction motor has internal encoder equipped. We are using servo motors, and additionally an encoder for position check. Because the position control resolution requirement is about 1 degree, I am thinking about abandoning servo motor, and to use induction instead. Servo motor has internal encoders for outputting pulse information. And I wonder, if there are induction motors with internal encoders. Thanks in advance. Ting
-
Creating a HTML based HMI: Read/Write values to PLC
tpoirier posted a topic in Allen Bradley / Rockwell Automation
Hi all, So this is more of a theory / how would you attack this problem, question: I'm creating my first HMI and while playing around in FactoryTalk View Studio I noticed I can add objects to a screen. I can add a browser and with some work I can get it to display an HMTL file directly in the screen. So the browser in this case is opening a file stored locally, not something served up from the internet. Which opens up the question, could I write most of my HMI in HTML and Javascript? As a previous developer having the ability to control more of the UI would be amazing and perhaps easier to use/maintain. The only pitfall that I haven't been able to figure out is how to get real time values from the PLC. I'd welcome anyone's input on the idea in general or if someone knows a good method for getting/setting values from the PLC. Thanks! -
Turning inches traveled per pulse (a real number) to inches per minute
487mcgill posted a topic in Allen Bradley / Rockwell Automation
I am currently trying to get my program to take distance traveled per pulse, which is based off of the diameter, and convert it into IPM. I am using RS Logic 5000 software. If anyone could help me get over this hump I would really appreciate it! -
Hello all, I am experiencing an unusual (and what appears to be an unheard of) behavior in my CompactLogix L18ER controller. I am setting the date/time of the controller from my work station, however when I GSV WallClockTime, it is reporting 4 hours different. I have asked our local resources as well as done some forum and knowledgebase searching without result. Has anyone encountered this before? Attached is a screenshot of the controller time vs. the wall clock time. This isn't mission critical since it can be manually adjusted however I would like to understand what is taking place that would cause this behavior. Thanks!
-
I need to replace existing encoder with quadrature output which is failing. We need to have minimum measuring distance of 60 inches. The encoder installed by manufacturer is Temposonics R-series RHS0650UMSO1Q1AC10 The resolution can be lower than the current encoder, probably 500 counts/inch or higher would be OK. Do you have any product that can be used? I was thinking about string encoder but I am open to suggestions.
-
Hi Good Day, I need a suggestion, I have an omron encoder, encoder counter meter (K3NC-NB1A) and communication card RS-232C 25pins (K31-FLK1). My question is, what is the best omron software to read and manipulate the data from the encoder (I have CX-one software but I only use CX-programmer). I want to capture the encoder pulse and convert to velocity, acceleration, deceleration and also energy absorbtion. I have to use mathematical formula such as two times differentiation. I also need to show grapf and display final result that is energy absorbtion reading. Or is it much simple if I use VB / labview / java software? Thank you in advance
-
I need help SSI Encoder with Micrologix 1400
Angel Valdez posted a topic in Allen Bradley / Rockwell Automation
I have a project where I need to use an SSI Absolute Encoder with a Micrologix 1400 PLC. I've never done this and need help. The SSI have a Clock and Data signals that are different from anything I've ever used. 1.Can it be done using the HSC inputs? 2. I found an AMCI card I could use but I am trying to keep everything AB and in the Micro Family. 3. I don't want to use Gray Scale encoders because of the number of Inputs I have to use. Trying to package a small enclosure and don't much room left. 4. AB sells an SSI encoder but they don't have any info on hooking up to anything other than Point IO module.(kills my budget) Thanks and any assistance would be greatly appreciated. ~Angel -
S7 to CompactLogix through Prosoft PLX32-EIP-SIE
bgtorque posted a topic in Allen Bradley / Rockwell Automation
Hi I have a customer who wants to communicate some setpoint information from their Siemens S7 PLC to a CompactLogix L32E PLC. I have installed a Prosoft PLX32-EIP-SIE for ethernet-to-Siemens Industrial Ethernet comms. On receiving a setpoint in from the S7 I then close a loop with some speed feedback in the L32E with a PID. I don't have any access to a Siemens S7 (or software) to test that the comms is working before the unit is shipped, all I have is the CompactLogix hardware. I do have a second CompactLogix PLC / PanelView HMI, but I dont think that this will give me the comms to talk to the SIE port in the Prosoft. I was hoping to have a simple slider on the PanelView to change an integer value to simulate the setpoints coming from the S7. Does anyone have any idea how I might implement this with AB hardware / RSLogix / FactoryTalk?