

Lyrical_CT
MrPLC Member-
Content count
5 -
Joined
-
Last visited
Posts posted by Lyrical_CT
-
-
Well MC_DigitalCamSwitch does not look like the way to go - think i will just stick with the ST code above - with my brake cycle time at T#5ms - it seems okay for now.
-
Design Improvement Ideas :
I currently use a 24v DC slipping brake (either Clarke or Warner) to prevent a reel of film from over-rotating -
With Previous motion controllers - i have used timers at first then progressed to using a Virtual axis and a switch to make my pulse from NX- Digital output card to a Solid State Relay (PSWITCH command for anyone familiar with TrioBasic) and this has worked pretty well.
I have the same physical setup on a new piece of machinery but am now using NJ and Sysmac -
Have used a TOF and TON in inline ST to control brake and it sort off works - brake can feel a bit lumpy and can chatter and bounce a bit adn am worried about the reliability when the machine is running and the controller is doing more.
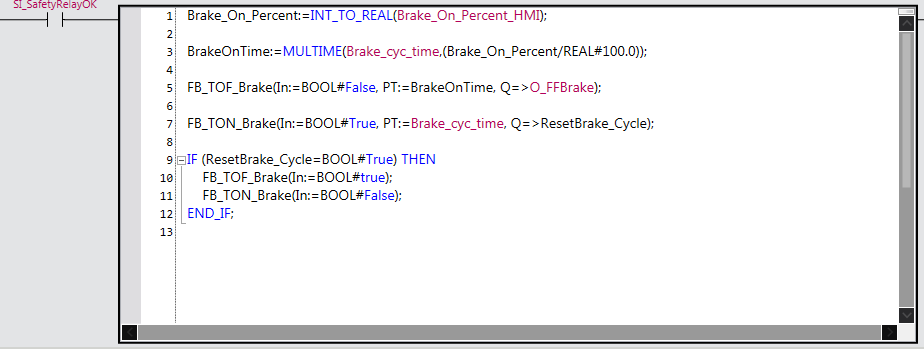
(brake cycle time t#10ms and tried at 100ms also)
I did try using the Time Proportional Out FB - but this was far worse than the above.
I think i will try my luck at created a new virtual axis e.g.
Rotary Mode - min 0 max 1000
Run with MC_Move_Velocity when Machine is running and use an MC_digital Cam Switch to create my output Pulse.
I am new to the Forum and trying to get more involved with others rather than working in Isolation - so wondering if anyone has any suggestions or thoughts or have done anything similar in SS?
Thanks in Advance,
-
On 8/2/2018 at 9:47 PM, ParaffinPower said:I think this is a problem specific to Mitsubishi, confirming my opinion that it should be thrown in the bin.
I agree.....Used GX IEC for years and found it shocking at times.
Used TrioBasic which helped me develop text based programming -
And now I use Omrons Sysmac Studio - i like the ability to use ladder and Inline ST very useful -
Horses for Courses - while SS isn't perfect - The problems i used to have with GX IEC and Mitsubishi in general seem like a distant memory.
-
I have been using Sysmac for about 5-6years now, from about V1.06 - having mainly used Mits GX-IEC and TrioMotion.
And still being the only one in my company using the NJ - it can get lonely at times...
I stumbled across this thread while looking for a method to accomplish registered film positioning (what i would use a REG_Input and MoveModify in Trio) -
MC_MoveFeed in SS should suit me just fine for now.
There wasn't much resource knocking about in 2012/13 - its great to read through the thread and see others highlighting things that had bugged me over the years that up until today i was still frustrated by - all my outputs now align to the Right
") and i can now create Local Variables directly from the ST !!!!
and i can now create Local Variables directly from the ST !!!!
- and when i get chance I'm going to check out creating a union to directly address bits in an INT/DINT - this is something i used to find really useful as i use Beijers HMIs not Omron.
Anyway - Thanks GUYS!!
PWM for Brake Control
in NJ Series / Sysmac Studio
Posted
Thanks for your suggestion - i will look into this and see if it makes a noticeable difference - i understand what your saying just not sure how to implement it -
Most of my work with the NJ as been with using Cams - so i'm not too sure on how to program a 0.1ms interrupt routine?
Can you point me in the right direction?